MATLAB Simulink到ROS C++节点转换教程
需积分: 5 81 浏览量
更新于2024-08-03
收藏 2.02MB DOCX 举报
"该资源是一份教程,详细介绍了如何将MATLAB Simulink中的自动驾驶控制算法模型转换为C++ ROS节点程序。教程适用于有MATLAB 2022a及Python 2.7 (或Python 3 for MATLAB 2022)环境的用户,涉及Windows 11和Ubuntu 18.04/20.04操作系统。教程内容包括Simulink模型转C++代码、创建自定义消息类型、在Linux环境下编译代码以及测试ROS节点的通信。"
**正文**
在自动驾驶领域,MATLAB Simulink常用于设计和验证控制算法,而ROS (Robot Operating System) 是一个广泛使用的开源机器人软件框架。将Simulink模型转化为ROS C++节点可以实现算法的高效部署和与其他ROS组件的集成。以下是将Simulink程序转化为ROS C++程序的步骤和方法:
1. **Simulink模型转C++代码**
- **环境准备**: 首先确保你有MATLAB 2022a和相应的ROS版本(如ROS Melodic或Noetic)。如果使用MATLAB 2022,Python环境应升级至Python 3,并确保MATLAB能访问到Python环境。
- **使用ROS工具箱**: 在MATLAB中启动`rosinit`命令以开启`rosmaster`。然后,在Simulink环境中利用ROS工具箱的`subscribe`和`publish`模块连接模型的输入和输出。
- **转换过程**: 通过Simulink的`Code Generation`功能生成C++代码,同时配置生成的代码以适应ROS环境,包括设置消息类型为ROS消息。
2. **创建自定义ROS消息类型**
- 如果模型使用了自定义消息类型,需要在Simulink中创建这些消息类型,并导出到ROS的`msg`目录中。这可以通过MATLAB的ROS接口完成,确保Python环境和CMake配置能够识别这些消息。
3. **Linux环境下的代码编译**
- 将生成的C++代码和相关文件转移到Ubuntu系统中。配置好ROS工作空间,使用CMake和catkin工具链来编译代码。
- 创建`CMakeLists.txt`文件,指定源代码位置,链接所需的ROS库,并确保编译过程中包含了自定义消息类型。
4. **构建和测试ROS节点**
- 使用`catkin_make`命令编译整个工作区,生成可执行的ROS节点。
- 运行`source devel/setup.bash`使环境变量生效,然后通过`rosrun`命令启动新生成的节点,并使用`rostopic`和`rosnode`等工具进行调试和测试。
5. **算法模块与CAN收发模块通信**
- 在实际应用中,控制算法可能需要与硬件设备如CAN总线进行通信。这通常涉及到创建一个专门处理CAN通信的ROS节点,该节点负责接收和发送CAN消息,并通过ROS话题与算法模块节点进行数据交换。
6. **系统集成和测试**
- 完成以上步骤后,将新的ROS节点集成到整体系统中,确保所有节点能够正确通信,算法的输出符合预期,并且整个系统在自动驾驶测试平台上稳定运行。
这个过程涉及到多个技术领域,包括MATLAB编程、ROS接口、C++编程和Linux系统管理。熟练掌握这些技能对于成功转化和部署Simulink模型至关重要。遵循教程中的步骤,逐步操作,可以降低转换过程中的困难。记得在每个步骤完成后进行充分的测试,确保代码质量和系统的稳定性。
1.3 具体操作
1.3.1 不含自定义消息
Step1
:
在 MATLAB 命令行窗口中执行指令:rosinit,打开 rosmaster,如下图所示
【注意:后续操作中,需要此 master 一直处于开启的状态(不要对此窗口进行
任何操作,置于后台即可)】
图
1.3.1.1 ros master 窗口的开启
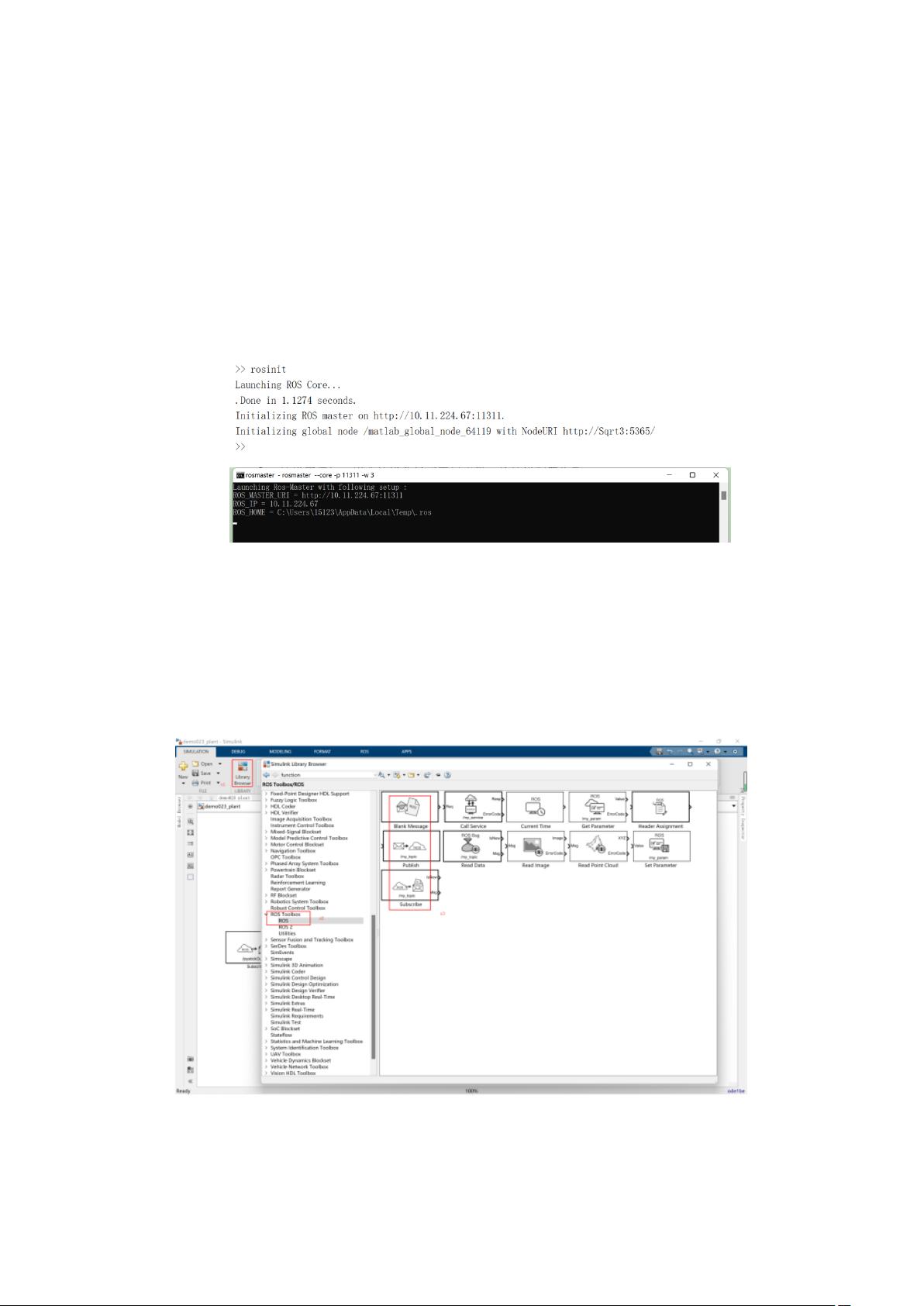
Step2
:
在 MATLAB 的 simulink 中打开 ROS 工具箱,使用其中的 subscribe 模块、publish
模块,分别连接 simulink 模型的输入、输出端,如下图所示。
图
1.3.1.2 Simulink 模型输入输出模块
剩余13页未读,继续阅读
125 浏览量
2024-04-04 上传
122 浏览量
2023-07-21 上传
267 浏览量
325 浏览量

三十度角阳光的问候
- 粉丝: 2601
 我的内容管理
展开
我的内容管理
展开







最新资源
- 有效清除快捷方式病毒的杀毒软件使用指南
- 高级Excel文件修复工具:一键修复损坏表格
- Angular轻量级库angular-inviewport实现视口检测
- Axis2WebService源码分析与本地测试指南
- ALIENTEK MiniSTM32开发板扩展例程详解
- Spark学习资源:三本精选书籍与面试题参考
- Thinkful作业数据集加载教程
- Android即时通讯聊天工具及动态表情开发指南
- Nx与Azure构建系统集成以优化monorepo CI流程
- PW光学设计误差计算方法解析
- 《深入理解计算机系统》第二版习题答案解析
- MakeCode扩展:lewis_anaya_setup2项目教程
- 尚书七号OCR软件:提升文档电子化效率
- 文件传输利器:uploadbean.jar与filemover.jar的综合应用
- ALIENTEK MiniSTM32开发板例程使用教程
- MyBatis 3.2.8 源码与二进制文件下载指南
