NSGA3算法详解:改进版NSGA2处理约束与自适应优化
需积分: 29 10 浏览量
更新于2024-07-17
11
收藏 32.55MB PDF 举报
NSGA3论文深入探讨了多目标优化领域的最新进展,它是NSGA2算法的一个重要改进版本。NSGA2(非支配排序遗传算法II)以其在解决无约束多目标优化问题中的卓越性能而闻名,但面对实际问题中的约束条件,其局限性逐渐显现。NSGA3论文旨在解决这一挑战,通过结合参考点基非支配排序方法,将NSGA2框架扩展到处理广泛的多目标优化问题,并包括约束条件。
首先,论文介绍了NSGA3的核心求解流程,它在原有的NSGA2基础上,引入了新的策略来处理约束问题。这可能包括对个体适应度函数的修改,使其不仅考虑目标函数的优化,还要满足约束条件。作者提出了三种类型的可扩展约束测试问题,这些问题能够适应任意数量的目标,同时对多目标优化算法构成了不同类型的挑战。通过这些测试问题,研究者可以评估算法在处理约束情况下的稳健性和效率。
此外,论文还涉及对先前提出的MOEA/D(多目标演化算法/分解)算法的扩展,使其也能适应有约束的优化环境。MOEA/D是一种广泛应用的多目标优化算法,但通过与NSGA3的对比,研究者发现NSGA3在处理具有大量目标的约束问题时表现更为出色。这表明NSGA3在解决复杂优化问题时具有更高的灵活性和有效性。
最后,NSGA3算法被设计成一种自适应策略,这意味着它能够在运行过程中动态调整自身的参数和行为,以更好地适应不断变化的问题特性。这种适应性使得NSGA3能够更高效地在实际应用中找到平衡点,即在满足约束的同时优化多个目标。
这篇NSGA3论文提供了重要的理论支持和实践指导,对于多目标优化算法的发展以及在工程、科学等领域的应用具有重要意义。通过理解和分析这篇论文,研究人员和工程师可以了解到如何有效应对多目标优化问题中的约束条件,提高算法的实用性和性能。
606 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 18, NO. 4, AUGUST 2014
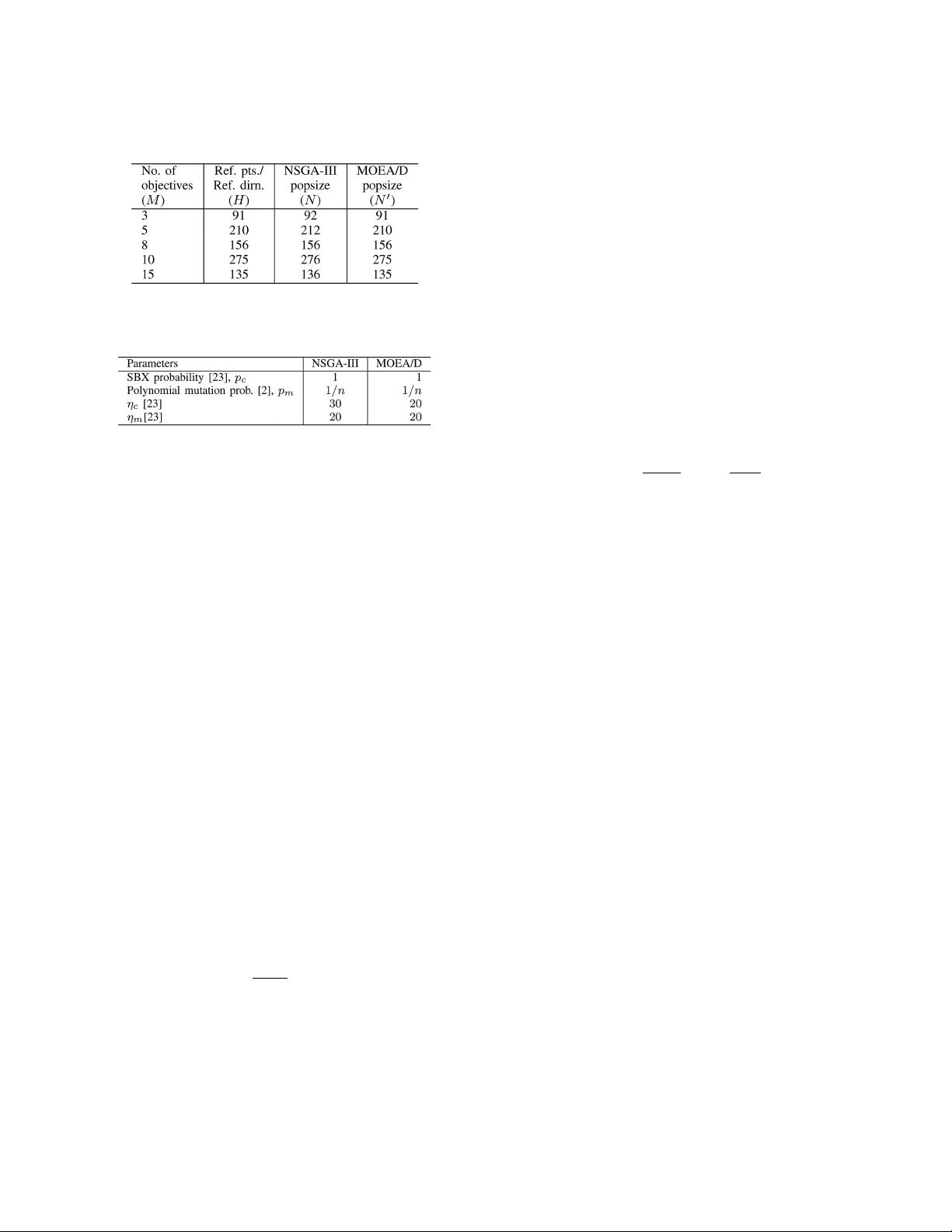
TABLE I
Number of Reference Points/Directions and Corresponding
Population Sizes Used in Constrained NSGA-III
and C-MOEA/D Algorithms
TABLE II
Parameter Values Used in Constrained NSGA-III and
C- MOEA/D. n Is the Number of Variables
do not use the DE operator, instead a real-coded GA with SBX
and polynomial mutation operators are used for creating the
offspring population. We also propose the use of PBI metric
(instead of the Tchebycheff metric), as PBI metric was found
to work better in the original study [1]. We name this version
of MOEA/D as constrained MOEA/D or simply C-MOEA/D.
V. Results
In this section, we present simulation results of the proposed
constrained NSGA-III and C-MOEA/D approaches. For this
purpose, we use a number of constrained test problems with
three to 15 objectives, designed to introduce different types of
difficulties to an algorithm. The problems are scalable both in
the number of objectives and in the number of variables.
For each problem, 20 different runs with different initial
populations are carried out, and the best, median, and worst
IGD performance values (which can only be computed for a
test problem with a known Pareto-optimal front) are reported.
To compute IGD values, first, we compute the targeted points
(Z
eff
) on the known Pareto-optimal front from the supplied
reference points or directions in the normalized objective
space. Then, for an algorithm, we obtain the final nondom-
inated points (set A) in the objective space. Now, we compute
the IGD metric value as the average Euclidean distance of
points in set Z
eff
with their nearest members of all points in
set A
IGD(A, Z
eff
)=
1
|Z
eff
|
|Z
eff
|
i=1
|A|
min
j=1
d(z
i
, a
j
) (3)
where d(z
i
, a
j
)=z
i
− a
j
2
. For both algorithms, the
population members from the final generation are presented
and used for computing the above IGD metric. The number
of reference points, population size, and other parameters
are kept in agreement with the original study [1] and are
tabulated in Tables I and II. In the case of C-MOEA/D,
two parameters δ (probability with which the parent solutions
are selected from the neighborhood) and n
r
(maximal number
of solutions replaced by an offspring solution) are set as 0.9
and 2, respectively, as suggested by the developers in [15].
In contrast, the proposed constrained-handling NSGA-III does
not require to set any new parameter.
A. Constrained Problems of Type-1
In Type-1 constrained problems, the original Pareto-optimal
front is still optimal, but there is an infeasible barrier in ap-
proaching the Pareto-optimal front. This is achieved by adding
a constraint to the original problem. The barrier provides
infeasible regions in the objective space that an algorithm must
learn to overcome, thereby providing a difficulty in converging
to the true Pareto-optimal front. DTLZ1 and DTLZ3 problems
[24] are modified according to this principle in this paper.
For the type-1 constrained DTLZ1 (or C1-DTLZ1), only a
part of objective space that is close to Pareto-optimal front is
made feasible, as shown in Fig. 1. The objective functions are
kept the same as they were in the original DTLZ1 problem,
while the following constraint is now added:
c(x)=1−
f
M
(x)
0.6
−
M−1
i=1
f
i
(x)
0.5
≥ 0. (4)
The feasible region and the Pareto-optimal front are shown
for a two-objective C1-DTLZ1 problem in Fig. 1. In all
simulations, we use k = 5 variables for the original g-function
[24], thereby making a total of (M + 4) variables to the
M-objective C1-DTLZ1 problem.
In the case of the C1-DTLZ3 problem, a band of infeasible
space is introduced adjacent to the Pareto-optimal front, as
shown in Fig. 2. Again, the objective functions are kept
the same as in the original DTLZ3 problem [24], while the
following constraint is added:
c(x)=
M
i=1
f
i
(x)
2
− 16
M
i=1
f
i
(x)
2
− r
2
≥ 0 (5)
where r = {9, 12.5, 12.5, 15, 15} is the radius of the hyper-
sphere for M = {3, 5, 8, 10, 15}. For C1-DTLZ3, we use k =
10 so that total number of variables is (M+9)inanM-objective
problem.
Both algorithms (NSGA-III and C-MOEA/D) are tested on
three- to 15-objective versions of the above two problems.
Fig. 3 shows that in the case of three-objective C1-DTLZ1
problem, NSGA-III is able to reach the feasible region and
find a well distributed set of points on the entire Pareto-optimal
front. C-MOEA/D is also able to find a nice distribution of
points (see Fig. 4). However, as is evident from Table III,
in most cases for the C1-DTLZ1 problem, NSGA-III per-
forms better than C-MOEA/D in terms of the IGD metric.
Interestingly, the best performance of C-MOEA/D is in most
cases better than that of NSGA-III. However, as the number
of objectives increases (10- and 15-objective problems), the
performance of NSGA-III is clearly better.
In addition, we compute the GD metric value for NSGA-III
solutions and tabulate the best, median, and worst values
in Table III. Small GD values indicate that NSGA-III so-
lutions are close to the true Pareto-optimal fronts in each
剩余20页未读,继续阅读
2018-04-11 上传
2023-04-07 上传
2023-09-08 上传
2023-09-04 上传
2023-08-18 上传
2023-08-18 上传
2023-08-13 上传

生飞
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
