智能汽车竞赛直立车模设计与控制解析
需积分: 10 135 浏览量
更新于2024-07-21
收藏 4.06MB PDF 举报
"直立车设计方案"
本资源详细阐述了直立车的设计方案,适用于初学者了解和参与如"飞思卡尔"智能汽车竞赛等类似活动。文档内容涵盖平衡原理、硬件模块、软件程序解析和调试过程,旨在帮助新手快速掌握直立车的制作和控制技术。
平衡控制
直立车的平衡控制是其核心部分,涉及到车辆在行进过程中保持直立的关键算法。设计中,车辆被简化为倒立的单摆模型,通过分析单摆的物理特性,结合车辆的速度、角度和角速度等因素,实现动态平衡。控制系统通常包括三层:角度控制、速度控制和方向控制,它们相互配合,确保车辆稳定行驶。
速度控制
车辆速度控制主要依赖于电机驱动电路和微控制器的配合。电机的转速与电压成正比,通过对电机供电电压的精确调节,可以实现对车速的精细控制。此外,加速度传感器用于测量车辆的动态加速度,为速度控制提供实时数据支持。
方向控制
方向控制则涉及到车辆转弯和保持直线行驶的能力。通过角速度传感器(如陀螺仪)来监测车辆的转动速率,然后通过调整两侧电机的转速差,实现车辆转向或修正行驶方向。
硬件模块
1. DSC介绍与单片机最小系统:采用数字信号控制器(DSC)作为主控单元,负责处理所有传感器数据和控制指令。
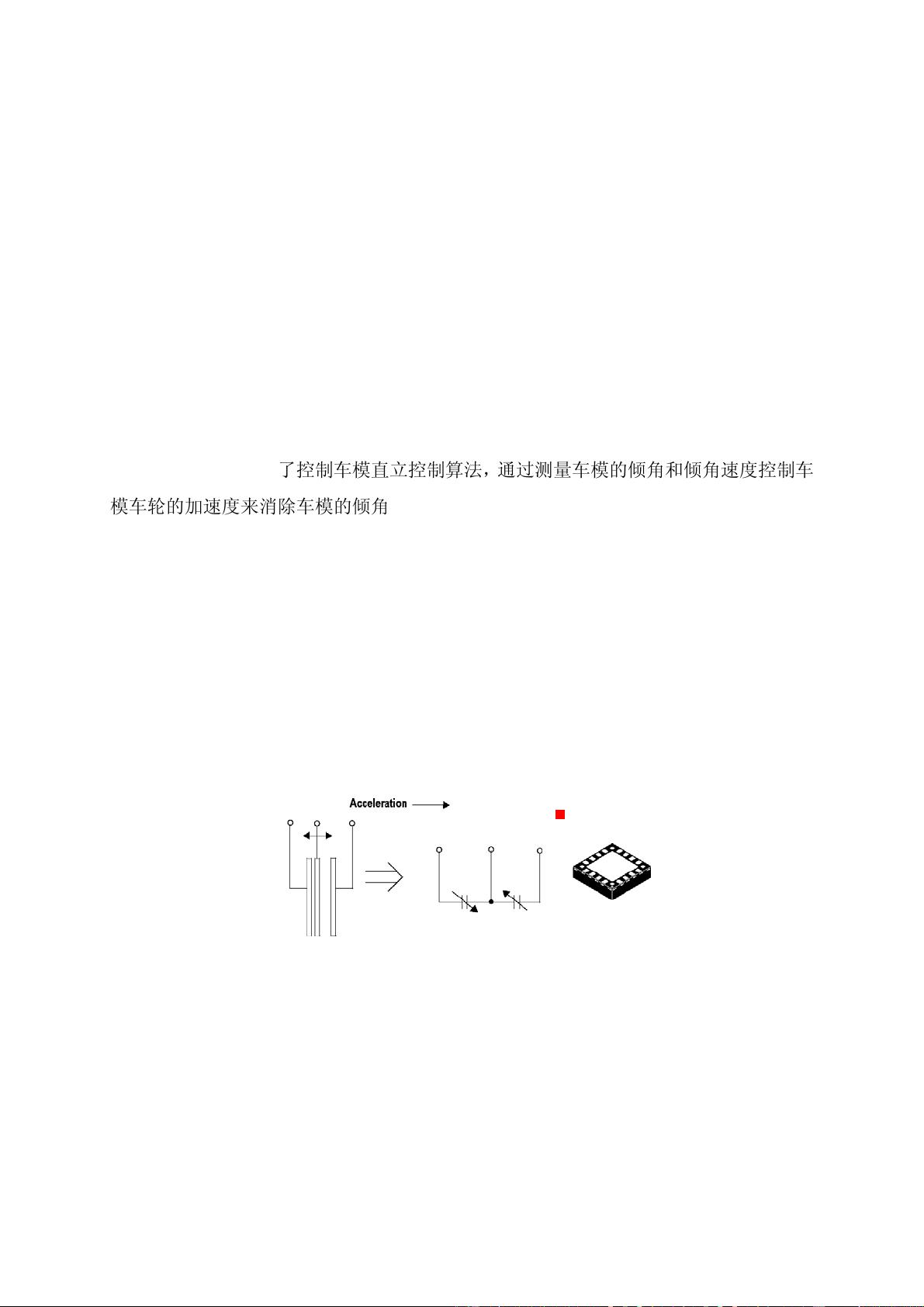
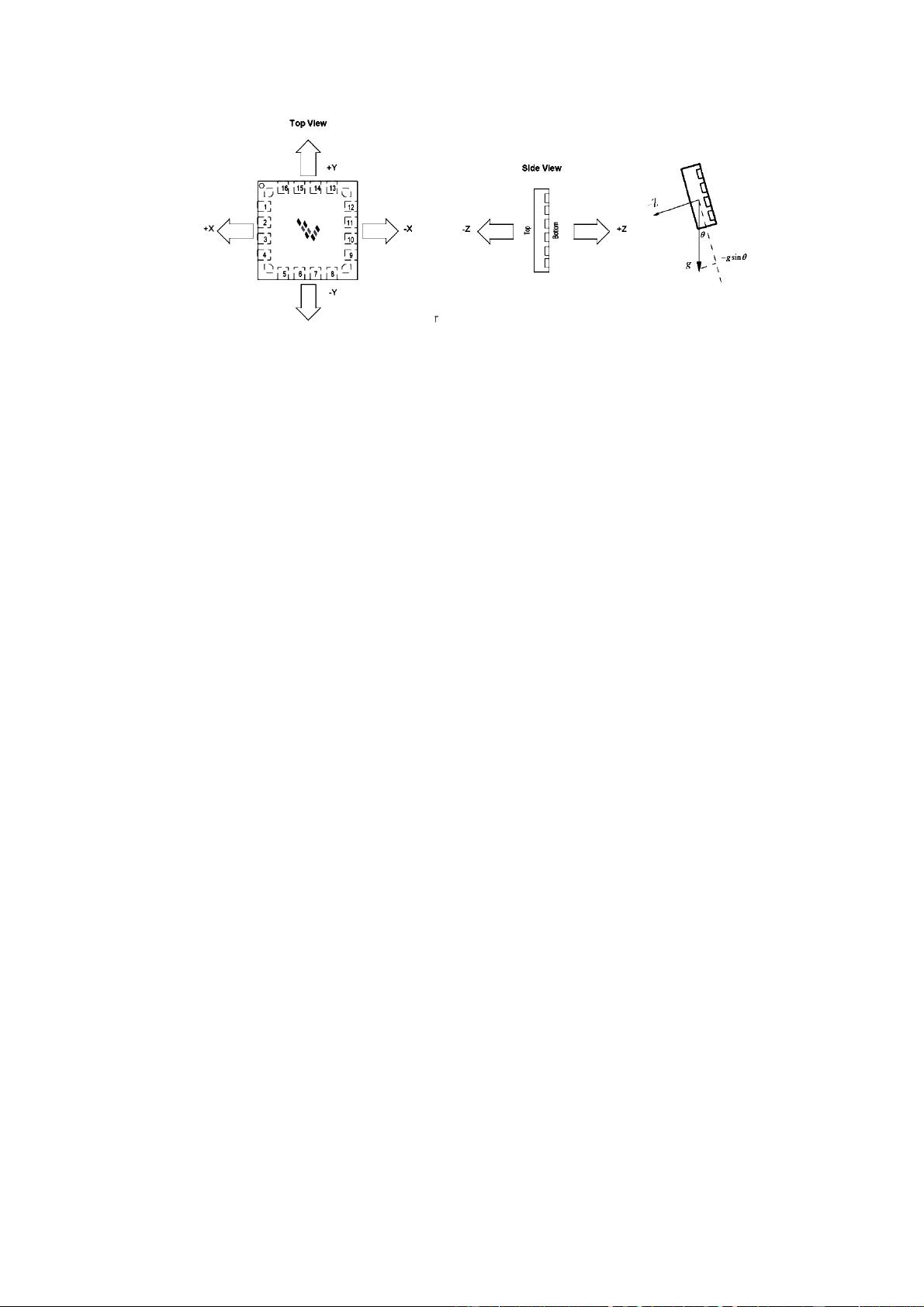
2. 倾角传感器电路:使用如MMA7260等三轴加速度传感器,测量车辆的倾斜角度。
3. 电机驱动电路:驱动电机的高速运转,同时具备调速功能。
4. 速度传感器电路:监测电机转速,反馈给控制系统。
5. 电磁线检测电路:用于赛道导航,识别赛道边缘。
6. 角度计算电路:基于角速度传感器,计算车辆的实时角度变化。
机械设计
机械设计包括车模的结构优化、传感器的安装位置以及注意事项,确保物理结构稳固且传感器能准确捕捉数据。
软件开发
软件开发主要包括控制算法的编写和DSC的硬件资源配置。算法实现涉及比例微分(PD)控制,以提高系统的响应速度和稳定性。
车模调试
调试过程分为参数设置、环境适应性测试等阶段,包括桌面静态调试和现场动态调试,以优化控制效果和提高整体性能。
通过本设计方案的学习,读者不仅可以掌握直立车的基本工作原理,还能了解到从理论到实践的完整流程,为参与智能汽车竞赛打下坚实基础。
k
1
k
2
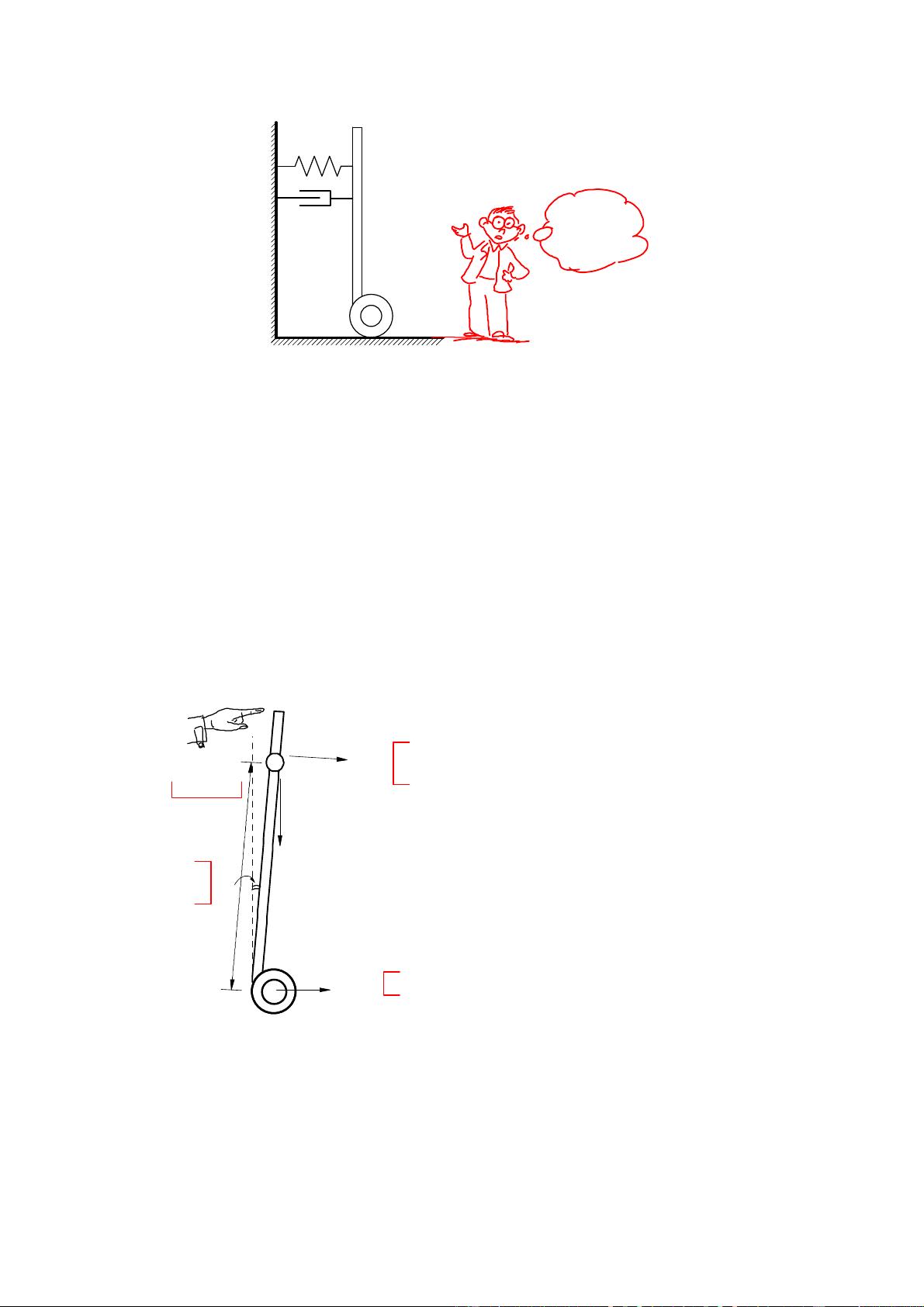
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
mg
θ
()
() () ()
2
2
d
d
t
LgtatLxt
t
θ
θ
=−+
()
xt
L
()
at
重心高度
外力引起的
角加速度
车轮运动加速度
车模
倾角
车模运动方程
()
() () () ()
2
2
d
sin cos
d
t
LgtattLxt
t
θ
θθ
=− +⎡⎤ ⎡⎤
⎣⎦ ⎣⎦
在角度θ很小时,运动方程简化为:
车模静止时:
()
0at =
()
() ()
2
2
d
d
t
LgtLxt
t
θ
θ
=+
图 2‐11 车模运动方程
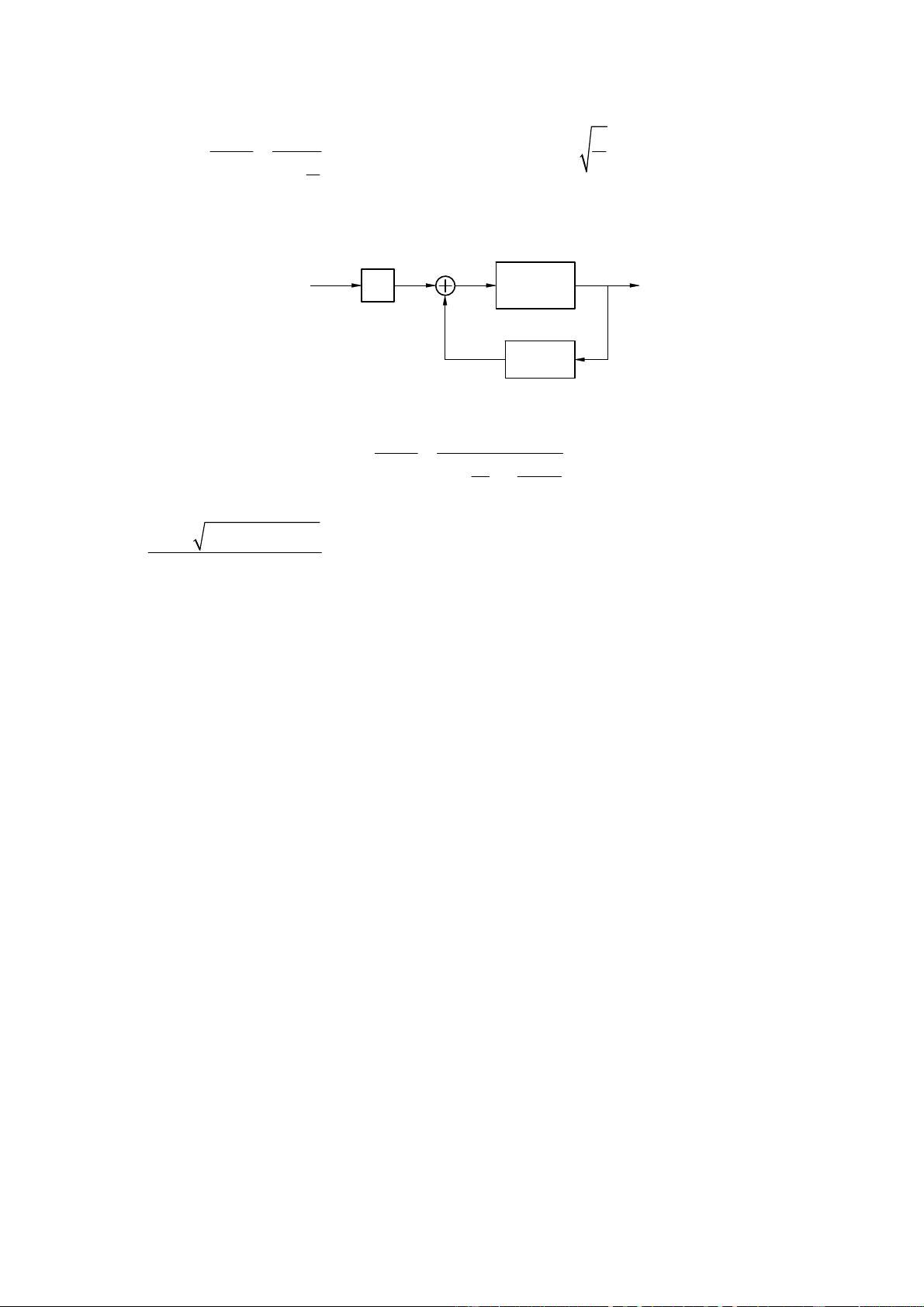
对应车模静止时,系统输入输出的传递函数为:
16

剩余107页未读,继续阅读
2012-06-04 上传
2019-11-01 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

justkyl
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
