汽车雷达系统设计与测试:基于CFAR的2D目标检测技术
需积分: 10 19 浏览量
更新于2024-07-17
收藏 1.8MB PDF 举报
雷达目标检测技术综述
在现代汽车雷达系统中,目标检测是最为关键的技术之一。为了实现高效可靠的目标检测,需要采用先进的信号处理和检测算法。本文将对基于 Accumulated Cell Average Constant False Alarm Rate(ACFAR)的2-D对象检测技术进行详细介绍。
**什么是CFAR**
CFAR(Constant False Alarm Rate)是一种常用的目标检测算法,旨在检测信号中的目标并抑制干扰信号。CFAR算法的关键思想是根据信号的强度和干扰强度之间的比值来确定目标的存在性。然而,传统的CFAR算法存在一些缺陷,如不能处理多维信号、检测阈值的选择等问题。
**什么是2-D CFAR**
2-D CFAR是基于CFAR算法的二维扩展,用于检测二维信号中的目标。2-D CFAR算法可以更好地处理多维信号,提高目标检测的准确性和鲁棒性。2-D CFAR算法的实现涉及到信号处理、阈值选择、目标检测等多个方面。
** Accumulated Cell Average Constant False Alarm Rate**
Accumulated Cell Average Constant False Alarm Rate(ACFAR)是一种改进的CFAR算法,旨在解决传统CFAR算法中的缺陷。ACFAR算法通过累加一定范围内的信号强度,计算出平均强度,并以此作为阈值来检测目标。ACFAR算法可以更好地处理多维信号,提高目标检测的准确性和鲁棒性。
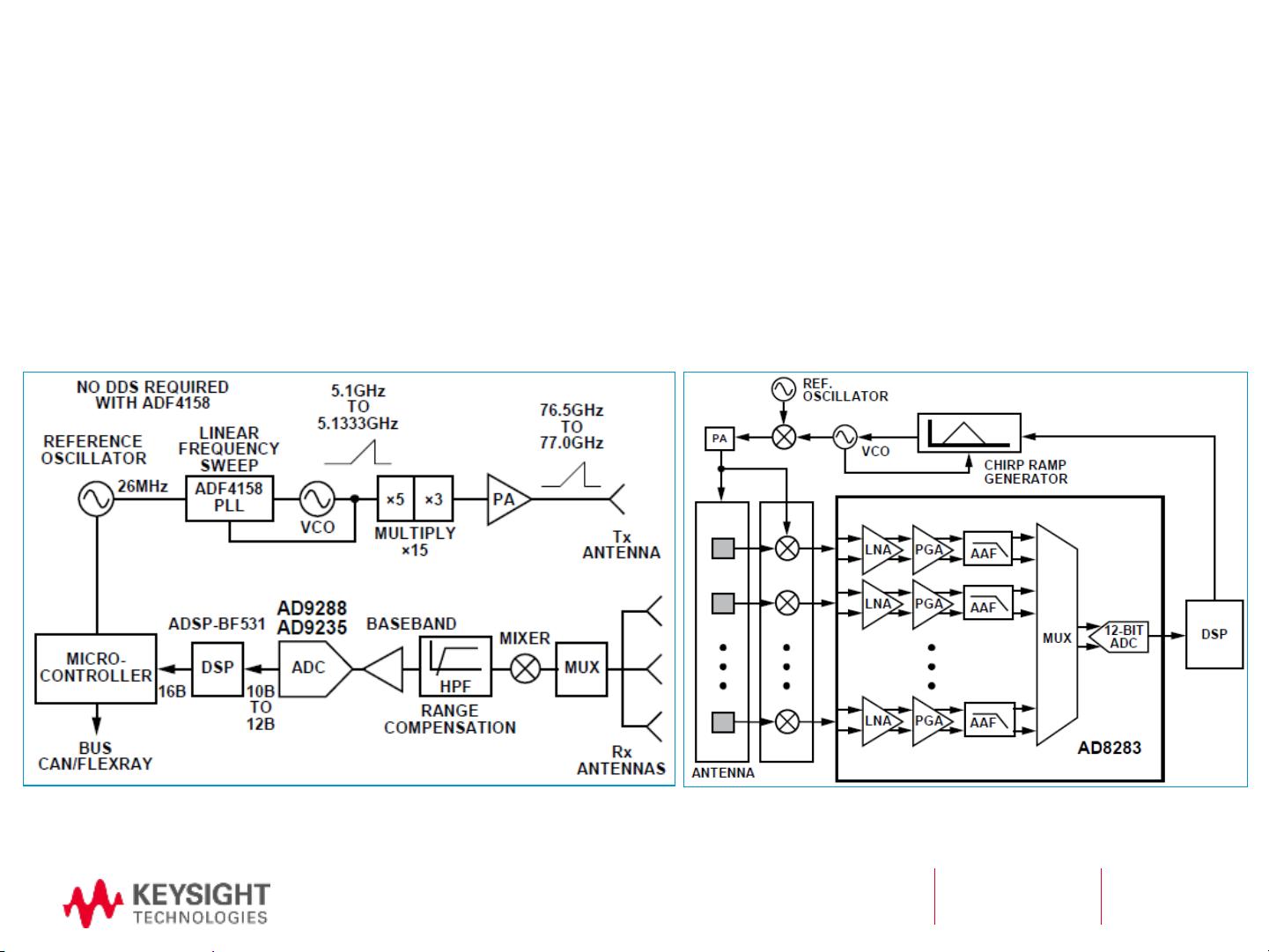
**雷达系统架构**
汽车雷达系统的架构一般包括以下几个组件:波形发生器、信号处理和参数估计、天线阵列、射频/微波前端、验证连接解决方案等。其中,信号处理和参数估计是雷达系统的核心组件,负责处理雷达信号、估计目标参数(如距离、速度、角度等)。
**汽车雷达应用**
汽车雷达技术广泛应用于汽车安全和辅助驾驶系统中,如紧急制动辅助、盲点检测、车道变换辅助、后方交通警示、自适应巡航控制、低速跟踪等。汽车雷达技术的发展趋势是从舒适性功能到主动安全系统,然后到自动驾驶系统。
本文对基于Accumulated Cell Average Constant False Alarm Rate的2-D对象检测技术进行了详细介绍,并对汽车雷达系统架构和应用进行了综述。雷达目标检测技术是汽车雷达系统的核心技术之一,对汽车安全和辅助驾驶系统的发展产生了重要影响。
Page
Automotive Radar Design & Test Challenges
7
Automotive safety application requirements:
CA(Collision Avoidance), AD(Autonomous Driving) are much higher than
ACC(Automatic Cruise Control)
•Extreme Low False Alarm Rate
•Extreme Short Delay
Design Consideration:
•High frequency & Wide bandwidth
•Low measurement time and computation complexity
- Ultra short pulse length (xx ns)
- Wide bandwidth continuous wave(CW)
•Unambiguous range and velocity measurement with high resolution and accuracy
- Combined LFM & FSK waveform design technique
Functional test requirements:
•High cost
•Unreliable test result
•Variable environments
Image by TRW Global Electronics
剩余36页未读,继续阅读
107 浏览量
点击了解资源详情
135 浏览量
110 浏览量
112 浏览量
113 浏览量
2020-02-22 上传
237 浏览量
2023-07-13 上传
214 浏览量

fangyougang
- 粉丝: 1
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- teacheruz:乌兹别克斯坦地方大学的学生管理系统
- dbdot:为postgres db模式生成DOT描述
- facebook-rockin-最佳自动化-selenium-scrape-no-api-tool-bot-machine-made-to-destroy-facebook:Facebook自动化:登录,喜欢,共享,评论,发布,删除。 包含视频“实际中”。 目的主要是通过在Fakebook平台中填充垃圾内容来破坏Fakebook平台(例如,当您决定离开所有这些Fcking平台时,在其中自杀)。 请安装,测试并提交您自己的改进和功能! 谢谢!
- Trigger
- 意法半导体ST_LinkV2.7z
- banking_app_angular
- kiosk_system_rpi3:Raspberry Pi 3的Nerves QtWebEngine信息亭系统
- Tribeca
- springboot-guide:Not only Spring Boot but also important knowledge of Spring(不只是SpringBoot还有Spring重要知识点)
- maven及其maven本地仓库
- SecretSanta2020:秘密圣诞老人游戏Jam 2020的游戏
- WWH21:我的winterwonderhack2021项目
- assertj-bean-validation:Bean验证的AssertJ扩展
- pytesseract:Google Tesseract的Python包装器
- FifaOnline4Api
- Triadxs
