
基于感兴趣区域特征融合的行人检测方法研究基于感兴趣区域特征融合的行人检测方法研究
近年来,伴随着智能车辆的快速发展,行人检测在车辆辅助驾驶方面越来越受到重视。提出一种二维显著性纹
理算子(Two-dimensional Significant Local Binary Pattern,TS-LBP),该算子能够反映图像的纹理特征、显
著性特征同时具有较强的抗噪声性能。首先提取感兴趣的目标区域,再提取目标区域颜色与纹理特征的融合特
征对目标进行特征描述,最后采用Adaboost算法训练得到一个行人分类器对行人进行识别。实验结果表明,该
方法检测快速准确,具有较好的检测效果。
摘 摘 要要: 近年来,伴随着智能车辆的快速发展,
关键词关键词: 行人检测;
0 引言引言
行人检测在车辆辅助驾驶系统中具有重要的应用价值。随着全球机动车辆的快速增长,交通事故也逐年上升,而大部分是
由于车辆未及时采取避让措施造成车辆与行人的碰撞。因此,对行人进行检测,对有可能发生碰撞的行人提前做出预警将会很
大程度上减少交通事故的发生。然而,行人检测一直是一个有难度、富有挑战性的课题[1]。
在过去的一段时间内,许多学者提出了多种行人检测方法。如基于运动信息的方法[2]、基于模板匹配的方法[3]等,但是
都不能够取得较好的检测效果。VIOLA P等人[4]采用级联AdaBoost学习算法对人脸进行检测,后来被应用到行人检测上,取
得了不错的检测效果;DALAL N等人[5]提出了梯度方向直方图(Histogram of Oriented Gradient,HOG)特征能够高效刻画
出人体的边缘特征,是目前广泛使用的行人特征描述子,但是其维度过高、计算速度较慢,因此不能满足车载检测实时性的要
求;WALK S等人[6]提出了颜色自相似性(Color Self-Similarity,CSS)特征的行人检测方法,因其包含较多冗余信息,不能
得到较满意的效果。
1 本文检测方法本文检测方法
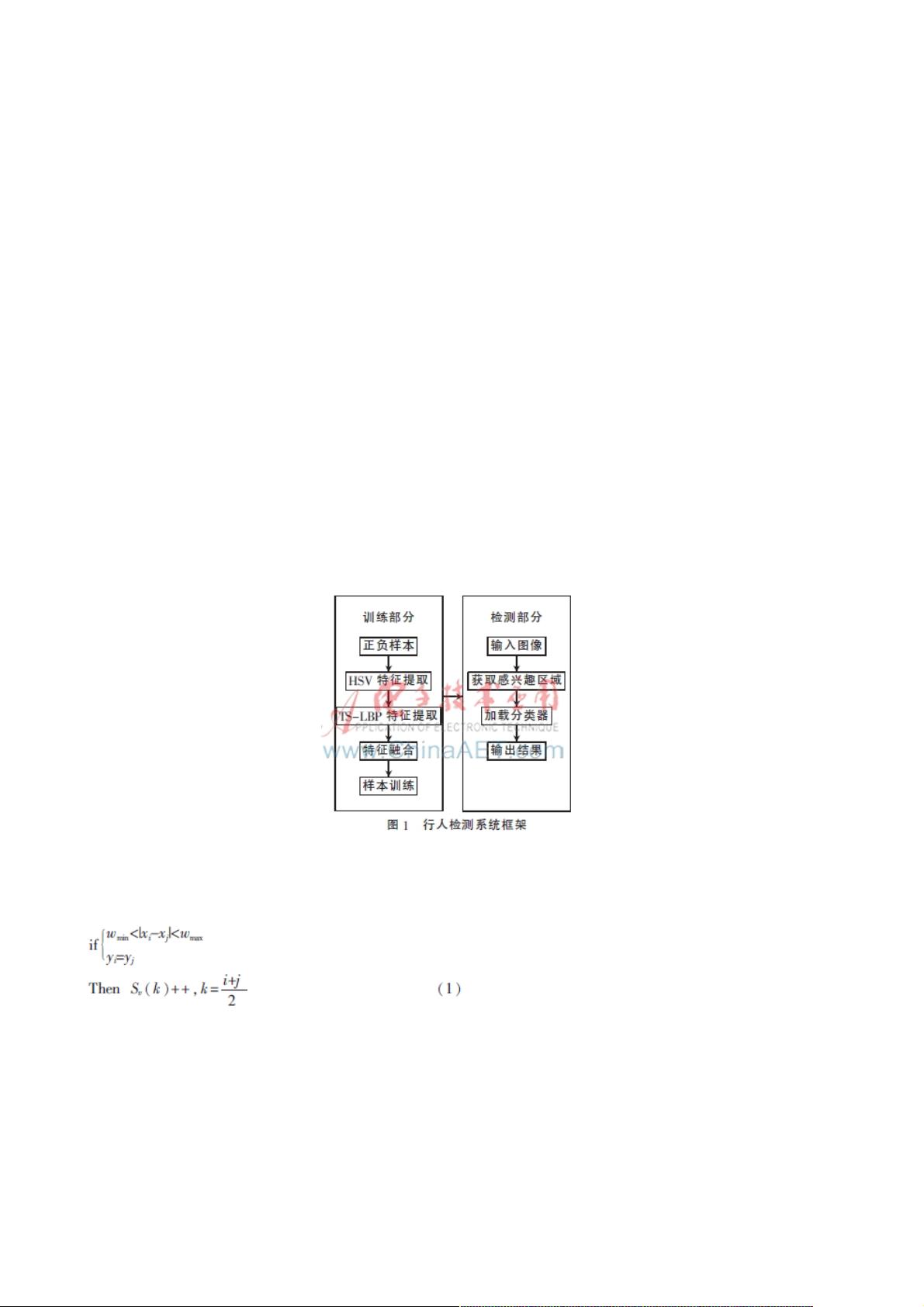
本文提出了一种在感兴趣行人区域的基础上将颜色特征与纹理特征相融合的算法,该算法具有特征维数少,计算速度快的
优点。该算法主要包括训练部分和检测部分,算法框架如图1所示。
在车载视频图像中存在着大量的非行人区域,可先确定行人可能存在的感兴趣区域,再对感兴趣区域的目标进行重点检
测,避免全局扫描图像而消耗过多时间。行人不管是站立还是行走,其垂直方向都具有很强的对称性[7]。可以利用这个特
征,粗提取行人有可能存在的感兴趣区域。采用式(1)来计算图像每列的边缘对称性。
其中,wmin、wmax为垂直边缘点的搜索范围,Sv(k)为对应第k列的对称性测度,数值越大表示图像越以k为对称中
心。参考文献[8]通过统计得出行人宽高比的平均值为0.4,可适当放宽比值,提取出更多的候检区域,避免漏检,同时可以排
除大量的非行人区域。
2 行人识别行人识别
2.1 颜色特征提取颜色特征提取
颜色特征因其具有计算简单、易于提取等优点而在图像处理方面被广泛使用。HSV(Hue、Saturation、Value)对光线变
化具有较强的适应能力。因此,首先按式(2)将输入的图像从RGB颜色空间转换到HSV颜色空间中。根据人体视觉对颜色的
感知特性对颜色进行非均匀量化,从而将HSV颜色空间量化为72维直方图特征向量。
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38548421
- 粉丝: 6
- 资源: 986
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


