APM/Pixhawk入门指南:构建多旋翼飞行系统基础
需积分: 21 88 浏览量
更新于2024-07-19
2
收藏 6.19MB PDF 举报
"Pixhawk学习指南(WalkAnt版)详细介绍了Pixhawk作为一款在多旋翼无人机领域备受推崇的飞行控制器,特别是针对初学者的入门教程。本文由@WalkAnt编写,最初整理于2014年12月,于2016年3月16日发布,旨在帮助用户理解和掌握Pixhawk及其在多旋翼系统中的关键作用。
Pixhawk是基于ArduPilot平台的一款飞行控制器,专为无人机爱好者设计,特别适合APM、PX4等系列。它的重要性体现在以下几个关键元素:
1. 硬件组成:
- 多旋翼组件:飞行系统的基础,包括稳固的机架、高效的电机、电子调速器(ESC)用于调节电机速度,螺旋桨提供推力,以及可靠的电池供电系统,这些都是飞行的核心组件。
- 飞控单元:Pixhawk作为核心,拥有强大的功能,如3轴陀螺仪(用于感知方向和姿态)、3轴加速度计(测量速度和加速度)以及磁罗盘(导航定位)。
2. 自动化控制:
- 飞控系统:Pixhawk提供飞行稳定性和高级自动控制功能,通过复杂的算法实现精确的悬停、航线飞行和避障等操作。
- 无线通信:与遥控器(如FSW或DSM2)配合,用户可以通过无线信号发送指令,实现对飞行器的实时操控。
3. 地面支持:
- 个人计算机:尽管不是必须的,但个人计算机可以作为地面站,用于编程飞控参数,监控飞行状态,并作为数据传输终端,显示飞行数据,如高度、速度和航向等,提升飞行效率和安全性。
此外,Pixhawk的学习不仅限于硬件配置,还包括软件编程、传感器理解、飞行规则和安全知识。通过这个指南,学习者可以从基础开始,逐步掌握如何设置飞控、编写飞行代码、优化飞行性能以及处理飞行过程中可能出现的问题。
Pixhawk学习指南是一份全面的资源,无论你是希望进入无人机领域的初学者还是希望深入研究飞行技术的专业人员,都能从中获得宝贵的信息和实践指导。通过这个指南,你可以建立起对Pixhawk及其在多旋翼无人机系统中的核心地位的深入理解,从而更好地应用到实际的飞行项目中。"
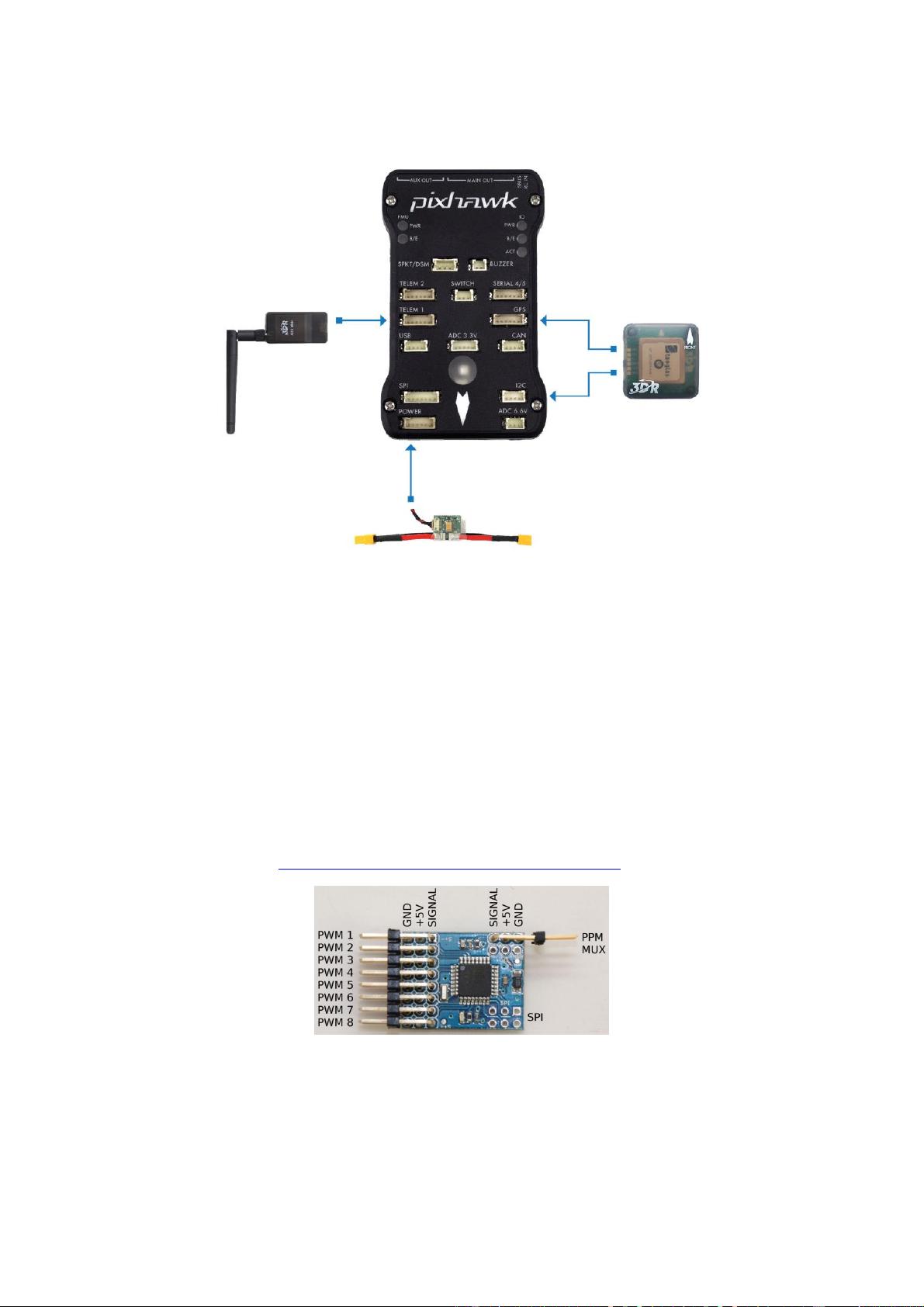
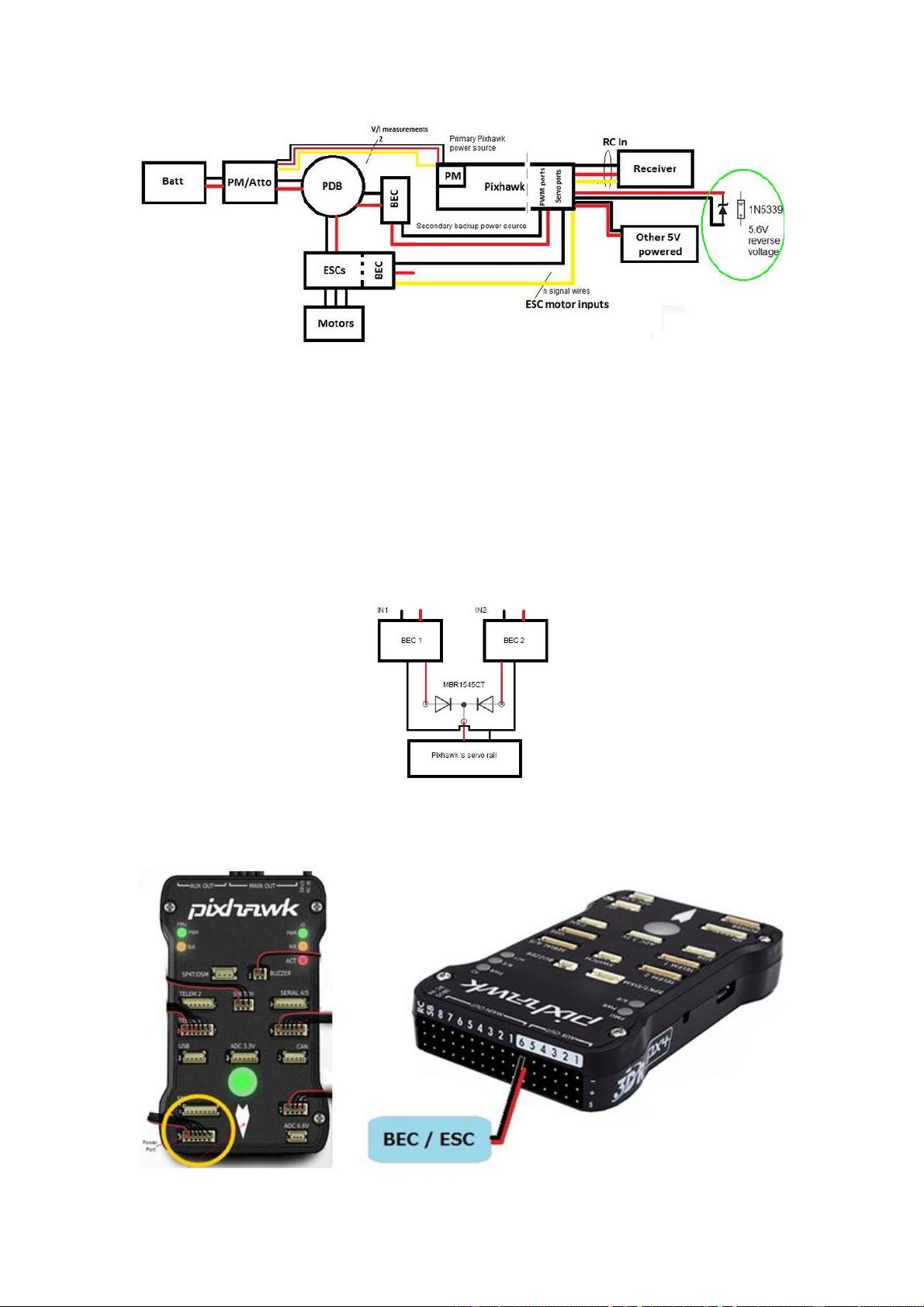
2.1.2. 连接其他外围(电源、GPS、数传)
1、BEC 电源模块:采用 DF13 型 6 芯电缆。(将电池电压转为 5V 给飞控器供电)
2、GPS 模块:GPS 采用 6 芯 DF13 电缆,指南针连接到 I2C 端口。(3DR u-blox GPS 模块
是带电子罗盘的,就是磁力计)
3DR u-blox GPS: To connect the GPS-only module to Pixhawk, you will need to modify the existing cable to use a 6-position DF13
connector on one end instead of the existing 6-position JST connector. When using this, or any other GPS-only module, Pixhawk will
automatically use its internal compass.
3、3DR 数传模块:连接到 TELEM1 口。
2.1.3. 连接遥控输入(RC INPUT)
Pixhawk 兼容 PPM 遥控接收器,诸如 Futaba S.Bus receivers, and Spektrum DSM,DSM2, and
DSM-X Satellite receivers。对于传统 PWM 接收器,可以使用 PPM 编码器(PPM encoder)转
换。
8 通道 PPM 编码器(http://store.3drobotics.com/products/8-channel-ppm-encoder-version-2)如下图:
PPM 连接口(下图):

剩余65页未读,继续阅读
点击了解资源详情
105 浏览量
2022-09-14 上传
2021-08-04 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

planeking2009
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
