面向对象的非线性有限元编程入门:静态与动态应用
需积分: 8 142 浏览量
更新于2024-07-17
收藏 401KB PDF 举报
本文主要探讨了面向对象的非线性有限元编程方法在静态和动态应用中的基础介绍。它扩展了之前处理线性弹性和非线性问题的FEM_Object环境[1][2],重点集中在静态分析部分。作者Stéphane Commend和Thomas Zimmermann来自瑞士联邦理工学院结构与连续力学实验室(LSC),他们旨在为初学者提供一个入门级的面向对象有限元软件包,用于进行非线性分析。
文章强调了面向对象方法在有限元编程中的应用,这是通过参考文献[15-18]以及[7-8]等深入讨论的。作者的目标不仅在于介绍技术本身,而且是为了满足近年来对这类程序日益增长的需求。在论文的第一部分,作者会提供一个简短的概述,解释如何将面向对象原则融入到有限元计算中,包括类的设计、对象的创建、封装和继承等核心概念。
非线性有限元分析涉及到材料行为的非线性特性,如塑性、大变形、热效应等,这些通常需要复杂的算法和迭代过程来求解。在编程中,这可能涉及构建应变-位移关系模型、实现非线性方程组求解器,以及处理收敛性和稳定性问题。为了实现这一点,编程语言如C++或Java由于其强大的抽象能力和灵活性,是理想的工具。
在开发过程中,代码的模块化和可重用性是关键,因为每个元素和子系统可以作为独立的对象来设计,从而简化复杂性并促进代码维护。此外,面向对象的封装允许数据的安全存储和操作,同时通过接口隐藏内部实现细节,提高了代码的可读性和可靠性。
该初级软件包可能包含以下组件:
1. **基本类库**:包括几何描述(如节点、元素、边界条件)、材料模型(如Hooke定律的线性化或用户自定义的非线性模型)、应力-应变计算。
2. **求解器**:基于牛顿-拉夫逊法或其他迭代算法的非线性求解器,用于找到系统的平衡状态。
3. **可视化工具**:用于显示解的空间分布、时序演化和结果分析。
4. **用户界面**:简单易用的图形用户界面,使得用户能够输入几何、施加载荷和选择材料模型。
总结来说,这篇文章是一份实用指南,不仅介绍了面向对象非线性有限元编程的基本原理,还提供了开发一个入门级软件包的框架。对于希望涉足这个领域的学习者和开发者来说,这是一个宝贵的资源,可以帮助他们理解如何利用面向对象的方法解决工程中的非线性问题。
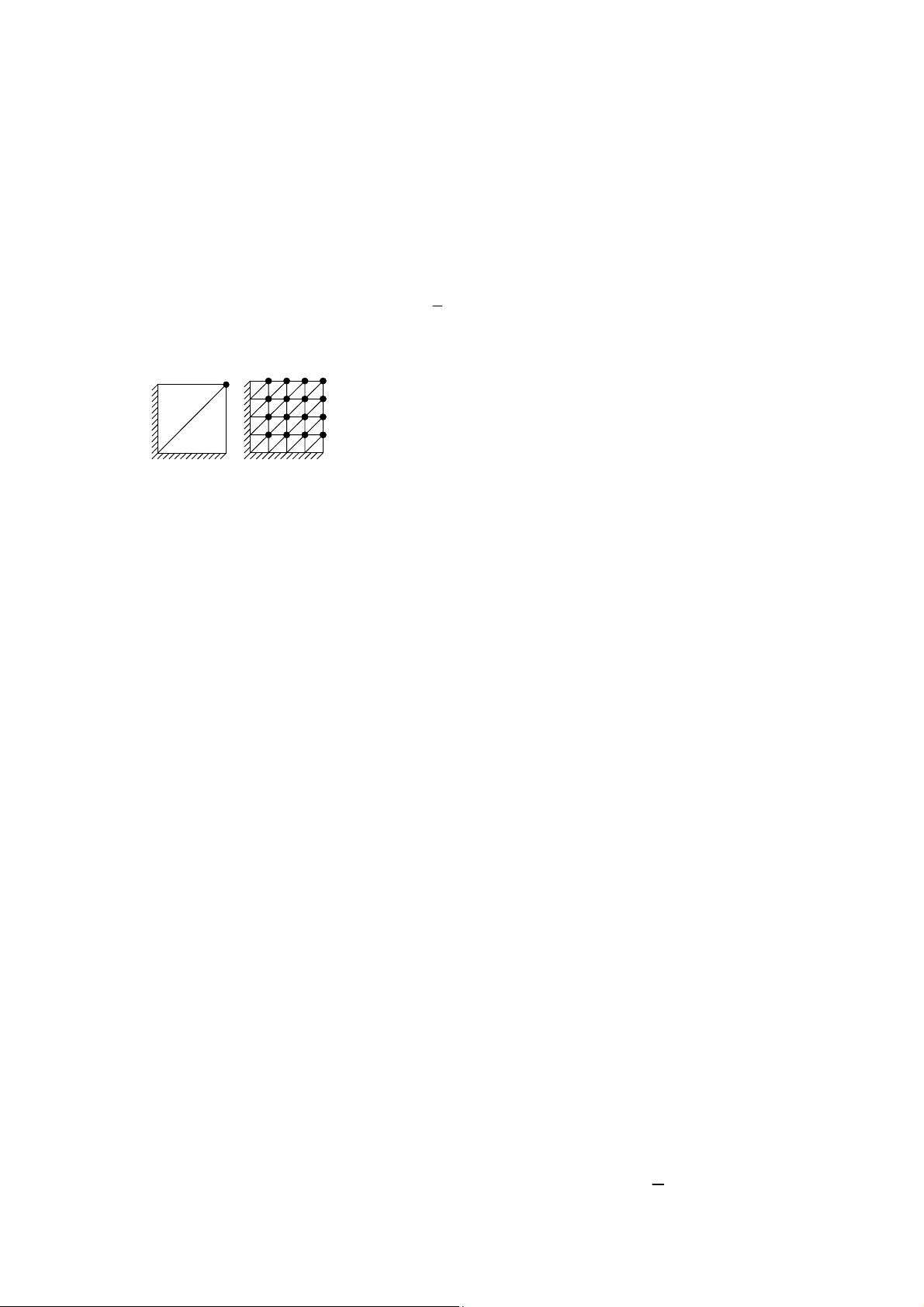
Figure 5a illustrates a simple mesh discussed in [4] with three
fixed nodes and one free node. Assume linear displacement
constant pressure elements; incompressible (constant
volume) deformation must take place. As a result of
kinematic constraint node N is required to move horizontally
in the lower triangular element, and required to move
vertically as a result of the kinematic constraint in the upper
triangular element; locking results, and obviously the
reasoning can be extended to a n x n mesh (figure 5b). This
kind of locking typically appears when using the full B
matrix as described later. Different methods can be used in
order to avoid this phenomenon [5]. Keeping in mind the
incompressible behavior of Von Misès material, the
B
approach can be applied here.
fixed
N
fixedfixed
fixed
Figure 5a Figure 5b
1.5 Why object-oriented programming?
Object-oriented programming (see e.g. [6], [7], [8] and
references therein) has proven in recent years to be one of the
easiest, fastest and most efficient ways to program robust
scientific software. The basic components of the finite
element method, like the node, the element, the material, can
easily be fitted into an objects world, with their own
behavior, state and identity. We review here the key features
of object-oriented programming:
a) Robustness and modularity: encapsulation of data
An object is a device capable of performing predefined
actions, such as storing information (in its variables),
executing tasks (through his methods), or accessing other
objects (by sending messages). Variables describe the state of
the object, while methods define its behavior. Objects hide
their variables from other components of the application. For
instance, class Element does not have direct access to its
Young Modulus. The Young Modulus is stored in class
Material. The object has to send a message, like
myMaterial
→
giveYoungModulus() to access it.
b) Inheritance and polymorphism: the hierarchy of classes
Every object is an instance of a class. A class is an abstract
data type which can be considered as the mold of the object.
Classes are organised within a hierarchy (class-subclass),
which allows a subclass (say, Truss2D) to inherit the methods
and variables from its superclass (say, Element).
Polymorphism expresses the fact that two different classes
will react differently (in their own manner) to the same
message. For instance, the message myElement
→
giveBMatrix() will be interpreted differently by an object of
the class Quad_U (defining quadrilateral elements) and an
object of the class Truss2D (defining truss elements).
The hierarchy of classes of a simple nonlinear finite element
code, providing an overview of the entire software, is given
in section 3. The fact that the code can be described in such a
compact way can be very valuable, when extensions are
considered.
c) Non-anticipation and state encapsulation
Non-anticipation expresses the fact that the content of a
method should not rely on any assumption on the state of the
variables. Strict obedience to non-anticipation will contribute
significantly to code robustness.
d) Efficiency
As far as numerical performance is concerned, languages
such as C++ have shown performances similar to Fortran.
With respect to code development speed using object-
oriented techniques, the programmer can maximize
reusability of the software and «program like he thinks»,
which leads to faster prototyping.
2 Main tasks of the finite element
program
2.1 Element level (class Element)
2.1.1 Forming the elementary stiffness
The definition of the elemental stiffness matrix K
e
writes:
e
e
T
dVBDBK
ep
e
∫
= (33)
The following method of class Element illustrates how the
element is forming its stiffness matrix.
//-------------------------------------------------------
FloatMatrix* Element :: computeTangentStiffnessMatrix ()
//-------------------------------------------------------
{
Material *mat;
GaussPoint *gp;
FloatMatrix *b,*db,*d;
double dV;
int i;
if (stiffnessMatrix) {
delete stiffnessMatrix;
}
stiffnessMatrix = new FloatMatrix();
mat = this->giveMaterial();
for (i=0; i<numberOfGaussPoints; i++) {
gp = gaussPointArray[i];
b = this->ComputeBmatrixAt(gp);
d = mat->ComputeConstitutiveMatrix(gp,this);
dV = this->computeVolumeAround(gp);
db = d->Times(b);
stiffnessMatrix->plusProduct(b,db,dV);
delete d; delete db; delete b;
}
return stiffnessMatrix->symmetrized();
}
This method shows that the construction of two matrices,
namely
ep
D and B , contribute to build the stiffness matrix.
Integration over the element is achieved with a loop over the
Gauss points of the element. In sections 2.1.1.1 and 2.1.1.2,
the construction of
B (or
B
) matrix will be scrutinized. In
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2011-06-08 上传
2010-01-15 上传
2021-10-02 上传
2021-04-27 上传
2021-02-11 上传
点击了解资源详情

橙心橙意JCLiu
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vectorized Analytic Two Body Propagator (Kepler Universal Variables):解析传播例程使用通用变量求解所有轨道类型的单一公式-matlab开发
- kodluyoruz-frontend-odev4:我们正在编写前端教育中的第四个作业
- clo::giraffe:Clo-命令行目标-可以进行验证以避免常见错误的CLI命令,参数和标志
- COVID19_Italy
- 泛域名PHP镜像克隆程序
- Accuinsight-0.0.194-py2.py3-none-any.whl.zip
- keensyo.github.io
- fusioninventory:管理FusionInventory代理安装和配置的角色
- node-child-service:运行和监控子进程
- laravel-pt-rules:与葡萄牙有关的验证规则
- vuex-store-tools:without快速建立Vuex商店...无需样板
- SS_Practica1
- buildroot-external-microchip:Microchip SoC(又名AT91)的Buildroot外部
- 数据库表结构对比工具.zip
- Tarkov
- Fark Nag Eliminator-crx插件
