80C51单片机驱动的超声波避障自动小车设计
"超声波避障小车设计论文"
这篇论文详细探讨了基于80C51单片机的超声波避障小车的设计与实现。80C51是一款经典的8位微处理器,因其易用性、多功能性和广泛的适用性在电子设计领域备受青睐。在这篇论文中,作者将80C51作为控制系统的核心,用于处理小车的各种操作指令。
设计的主要目标是构建一个能够自动检测和避开障碍物的小车系统,同时具备速度控制、自动停车、时间、里程和速度记录、自动寻迹和寻光功能。其中,超声波传感器扮演了关键角色,它能发射超声波并接收反射回来的信号,通过计算发射和接收之间的时间差来判断障碍物的距离,从而实现避障功能。
在系统设计中,采用了以下关键技术:
1. 速度控制:通过编程控制80C51单片机,调整电机的工作电压或电流,实现小车的快慢速行驶。这通常涉及到脉宽调制(PWM)技术,通过改变PWM信号的占空比来调节电机转速,实现小车速度的精细控制。
2. 传感器应用:超声波传感器不仅用于避障,还有可能与其他传感器(如光电检测器)配合,实现对环境的多方位感知。光电检测器可以用来识别特定颜色的标记或光线,辅助小车进行自动寻迹和寻光。
3. 新型显示芯片:论文中提到采用新型显示芯片来展示小车的状态信息,如时间、里程、速度等,这可能是LCD或者OLED屏幕,具有低功耗、高清晰度的特点,方便实时监控小车运行状态。
实验结果显示,该系统能够满足设计要求,电路结构简洁且可靠性高。通过对系统的硬件设计和测试结果的分析,证明了80C51单片机在控制复杂任务上的实用性,以及超声波传感器和其他辅助传感器在环境感知中的有效应用。
这篇论文对于理解80C51单片机在自动化控制领域的应用,以及如何利用传感器和微控制器设计智能移动机器人提供了宝贵的参考。同时,也为相关领域的研究者和工程技术人员提供了一个实际的项目案例,有助于他们开发类似的避障或自主导航系统。
电子发烧友 电子技术论坛
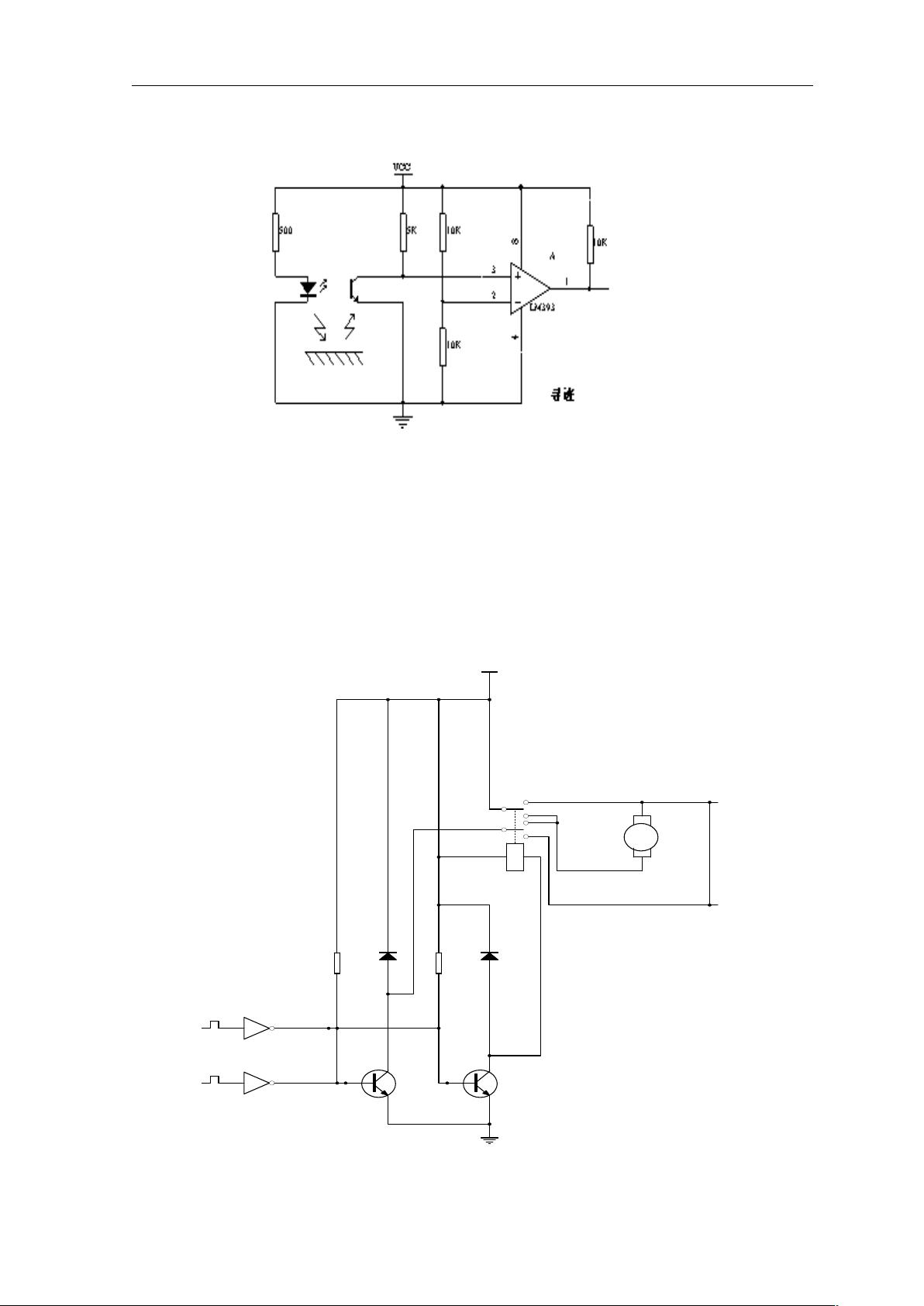
图 电动车的方向检测电路12
图 电动车的方向检测电路12
前进时,驱动轮直流电机正转,进入减速区时,由单片机控制进行 变频调速,通
过软件改变脉冲调宽波形的占空比,实现调速。最后经反接制动实现停车。前行与倒
车控制电路的核心是桥式电路和继电器。电桥上设置有两组开关,一组常闭,另一
组常开。电桥一端接电源,另一端接了一个三极管。三极管导通时,电桥通过三极
管接地,电机电枢中有电流通过;三极管截止时,电桥浮空,电机电枢中没有电流
通过。系统通过电桥的输出端为转向电机供电。通过对继电器开闭的控制即可控制
电机的开断和转速方向进而达到控制玩具车前行与倒车的目的,实现随动控制系统
的纠偏功能。如图 前行与倒车控制电路所示。
图 前行与倒车控制电路
A
-
+
d1
d882
300
1 2
A
74LS06 d2
8050
50 0
1 2
A
74LS06
VCC
D1 D2

剩余42页未读,继续阅读
2008-12-26 上传
2023-07-03 上传
2010-09-06 上传
点击了解资源详情
2023-07-10 上传
2020-03-01 上传

bt945
- 粉丝: 0
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 修正程序:外汇汇率和货币换算API
- JD-Test
- peanut-note
- Pixel-Show:自2005年以来,Pixel Show是拉丁美洲最大的创意活动。此存储库是为基于Pixel Show的iOS应用创建的
- PPl_lab20
- 大数据-电商订单大数据分析项目-OrderFromTmall.zip
- c代码-109-14z
- UCD-Resume
- curl_http_client:基于Curl的HTTP客户端-Curl php lib周围的简单但有效的OOP包装器
- mrslac:Maciel的Rust稀疏线性代数箱
- C-equivalent-to-Cracking-the-Coding-Interview:练习一些不熟悉的数据结构
- phaser-nineslice:Phaser的NineSlice插件!
- xstream-1.3.1.jar
- cpp代码-164.4.5.2
- keras-ACG-face-alignment:【ACG-face-alignment】ACG脸部对齐
- 基于Java SE 内容写的简单的学生成绩管理系统,用文件存储数据,swing写的界面.zip
