MEMS-IMU基础与标定技术解析
需积分: 50 126 浏览量
更新于2024-07-18
收藏 4.13MB PPTX 举报
"这篇资源主要介绍了MEMS-IMU(微机电系统惯性测量单元)的基础知识,包括导航系统的概念、MEMS惯性器件的分类和应用,以及相关的误差分析和标定技术。"
MEMS-IMU是现代导航系统中的关键组件,尤其在无人机、智能手机和其他移动设备中广泛应用。在导航系统的基本概念中,了解“海里”作为国际标准单位,惯性级导航系统的定义,以及惯性级陀螺和加速度计的精度要求至关重要。惯性级陀螺精度需达到毫地转率(0.015度/h),而加速度计的精度则至少要达到10^-4g。这些参数直接影响着导航系统的定位准确性。
MEMS惯性器件分为消费级和工业级两类。消费级如Invensense的MPU6000/MPU6050,因其低成本和六轴集成特性,在四轴飞行器和智能手机市场得到广泛采用。例如,Apple的iPhone4就配备了ST公司的L3G4200D陀螺仪和LIS331DLH加速度计。工业级器件如ADIS16405和ADIS16488,则适用于更苛刻的应用环境。
在讨论MEMS惯性器件的技术参数时,提到了非线性度、初始偏置误差和量程等关键指标。非线性度是指器件输出与输入之间关系的线性程度,初始偏置误差是指系统稳定后观测信息中的误差,通常通过初始化时求取均值来消除。量程则是器件能有效工作的输入范围。此外,对齐误差是MEMS-IMU中常见的问题,包括两个相关联的类型,对系统模型的建立和误差校正有直接影响。
在实际应用中,对IMU的标定技术进行实验分析是必不可少的步骤,它可以帮助减小由器件固有误差引起的定位偏差。这可能涉及静态和动态测试,通过数学模型和滤波算法(如乘性四元数扩展卡尔曼滤波器)来校正测量数据,从而提高导航系统的性能。
总结来说,这篇资源涵盖了MEMS-IMU的基础知识,从导航系统的基本概念到具体的器件参数,再到误差分析和标定技术,为理解和应用MEMS-IMU提供了全面的指导。对于想要深入理解或使用这类技术的读者,这是非常宝贵的学习材料。
二 .MEMS 惯性器件
2.MEMS 惯性器件的常见技术参
数
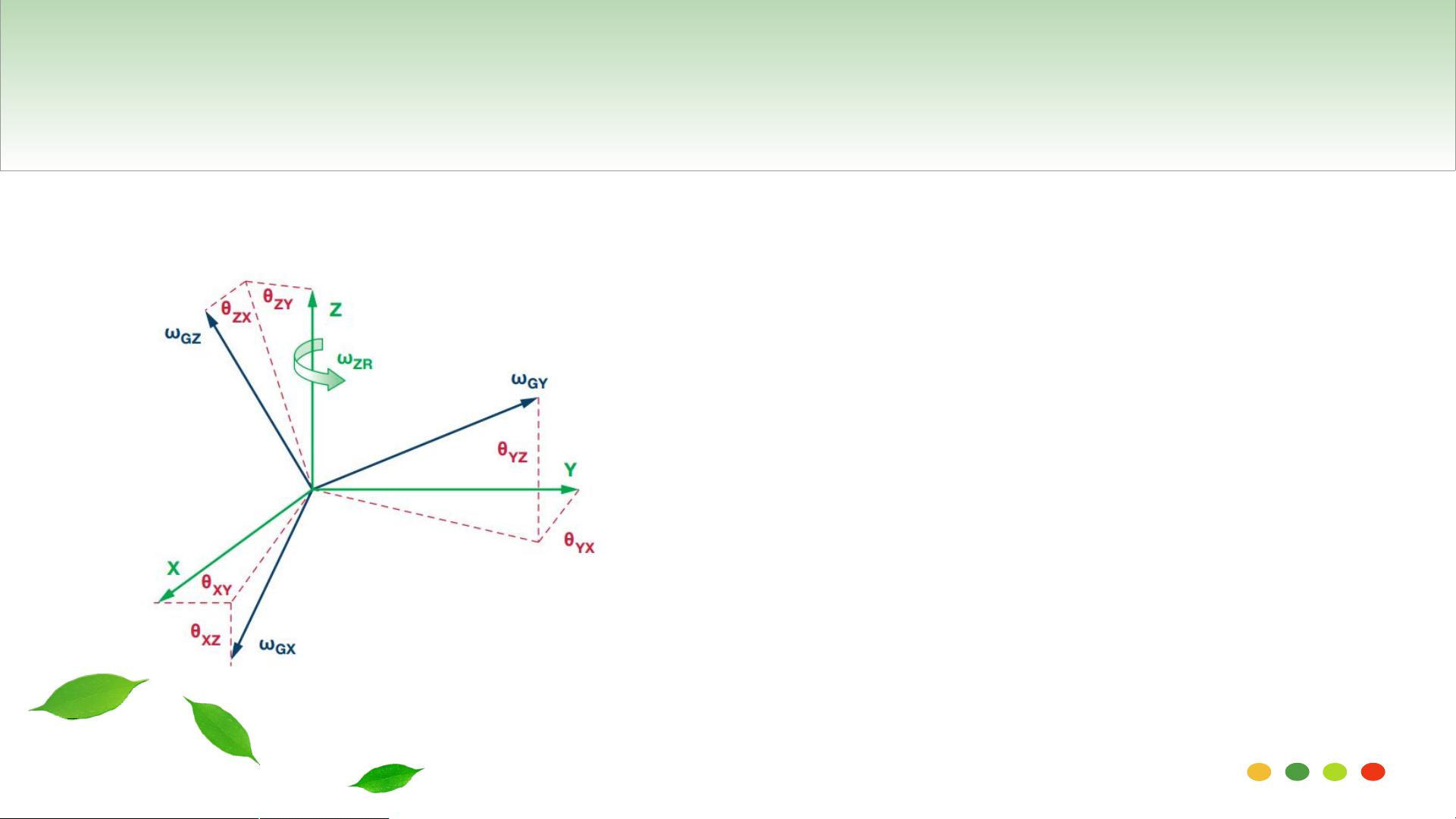
( 4 )对齐误差
参考文献: MEMS 陀螺仪中主要噪声源的预测和管理 ADI 公司 应用工程师 Mark Looney
三轴式陀螺仪对齐误差
MEMS IMU 通常具有两种类型的对齐误差,它
们相互关联,但在系统级建模中具有不同应用:
轴到封装和轴到轴。
“ 轴到封装对齐误差”描述陀螺仪相对于器件封装
上特定机械特性的对齐情况。将 IMU 安装到系统
后,如果系统无法支持惯性对齐,则轴到封装对齐误
差将成为整体对齐误差的主要因素之一。系统与
IMU 的机械接口的机械缺陷也会增加整体对齐误
差。
“ 轴到轴对齐误差”描述各个陀螺仪旋转轴相对于
其他两个陀螺仪的相对对齐精度。在系统可以实现简
单的对齐过程时,此参数影响最大,此时通常沿系统
的惯性参考系中的一个轴直线移动整个组件 (IMU 已
安装在系统平台上 ) ,同时需要观察传感器。

剩余53页未读,继续阅读
174 浏览量
230 浏览量
点击了解资源详情
190 浏览量
188 浏览量
868 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

ultimate1212
- 粉丝: 43
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







