TMC5160高功率步进电机控制驱动芯片数据手册
需积分: 0 31 浏览量
更新于2024-06-29
收藏 3.95MB PDF 举报
TMC5160数据手册是关于高功率步进电机控制驱动芯片的详细介绍。该芯片具有串行通信接口,能够实现自动目标定位的灵活斜坡发生器和业界最先进的步进电机驱动器结合在一起。通过外置外部晶体管,实现高动态、高扭矩电机驱动。
知识点1:步进电机控制驱动芯片
* TMC5160是一种高功率步进电机控制驱动芯片,具有串行通信接口。
* 该芯片能够实现自动目标定位的灵活斜坡发生器和业界最先进的步进电机驱动器结合在一起。
知识点2:步进电机驱动技术
* TMC5160采用外置外部晶体管,实现高动态、高扭矩电机驱动。
* 该技术能够提高步进电机的驱动性能,实现高扭矩和高动态的电机驱动。
知识点3:Motion Controller技术
* TMC5160具有Motion Controller技术,能够实现自动目标定位的灵活斜坡发生器和业界最先进的步进电机驱动器结合在一起。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点4:Step/Dir Interface技术
* TMC5160具有Step/Dir Interface技术,能够实现步进电机的精准控制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点5:MicroPlyer技术
* TMC5160具有MicroPlyer技术,能够实现步进电机的微步进控制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点6:Encoder Interface技术
* TMC5160具有Encoder Interface技术,能够实现步进电机的编码器接口。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点7:Resonance Dampening技术
* TMC5160具有Resonance Dampening技术,能够实现步进电机的共振抑制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点8:Stealth Chope技术
* TMC5160具有Stealth Chope技术,能够实现步进电机的无声运行。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点9:SpreadCycle技术
* TMC5160具有SpreadCycle技术,能够实现步进电机的高动态控制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点10:DcStep技术
* TMC5160具有DcStep技术,能够实现步进电机的直流电压控制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点11:StallGuard2技术
* TMC5160具有StallGuard2技术,能够实现步进电机的高精度无感知负载检测。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点12:CoolStep技术
* TMC5160具有CoolStep技术,能够实现步进电机的能效控制。
* 该技术能够提高步进电机的驱动性能,实现高精度和高灵活性的电机驱动。
知识点13:应用场景
* TMC5160广泛应用于工业自动化、机器人、医疗、办公自动化、监控系统等领域。
* 该芯片能够满足各种应用场景的需求,实现高精度和高灵活性的电机驱动。
TMC5160/TMC5160A DATASHEET (Rev. 1.17 / 2022-MAY-25) 16
www.trinamic.com
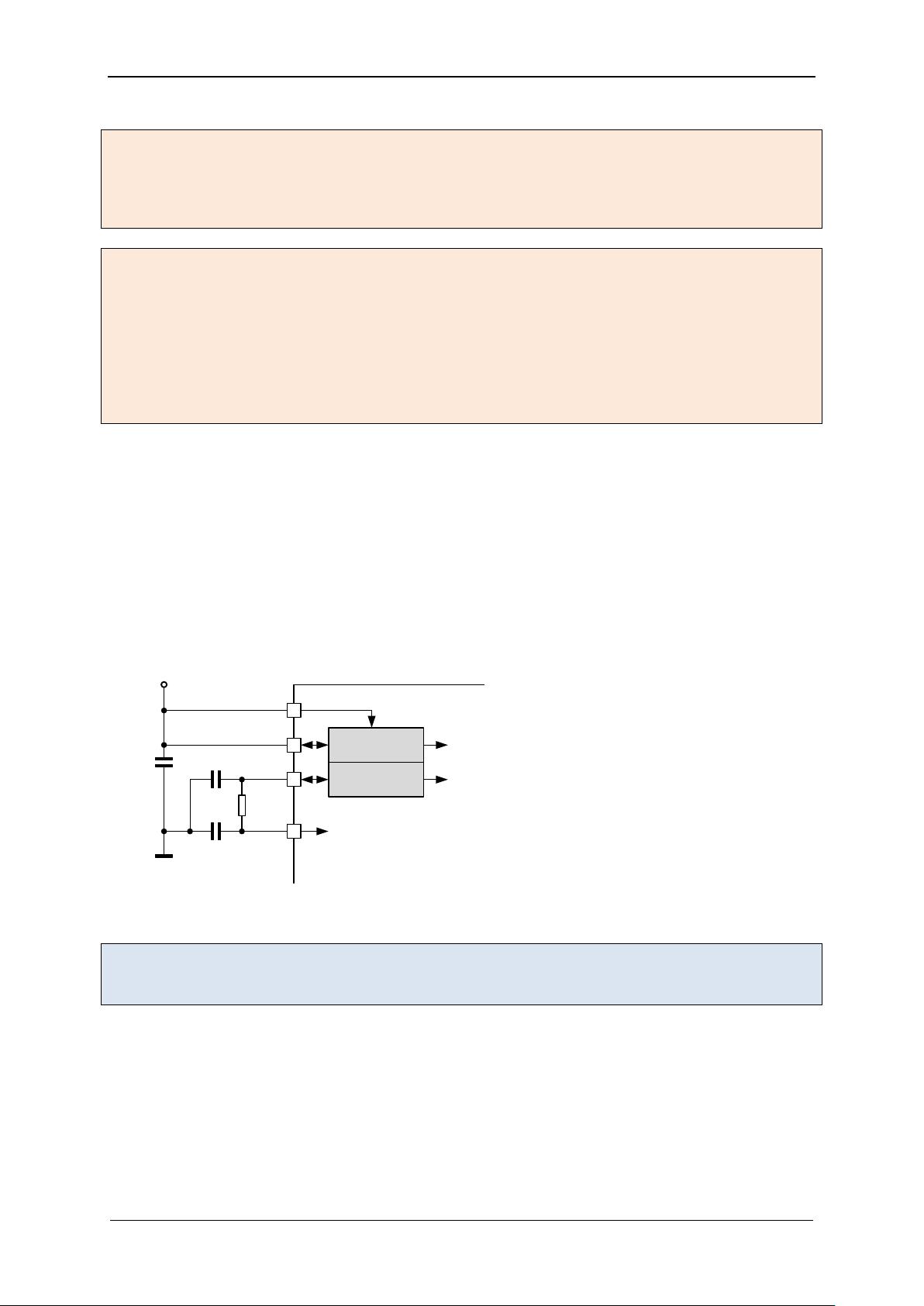
Attention
In case VSA is supplied by a different voltage source, make sure that VSA does not drop out during
motor operation. The motor driver should be disabled in case VSA becomes switched off before VS.
Hard switching edges on VSA might result in bridge cross-conduction otherwise. It is safest to derive
VSA voltage from VS supply.
Attention
In addition to filtering capacity near to the power bridges, provide sufficient capacity on VS located
close to the VS pin and the connection of the VCP capacitor, to ensure that high-frequency ripple,
caused by the switching edges of the power bridge transistors are kept well below 0.5V. Keep power
slopes below 1V/µs. Failure to do so could result in destructive currents via the charge pump circuit.
Provide overvoltage protection in case the motor could be manually turned at a high velocity, or in
case the driver could become cut off from the main supply capacitors. Significant energy can be fed
back from motor coils to the power supply in the event of quick deceleration, or when the driver
becomes disabled.
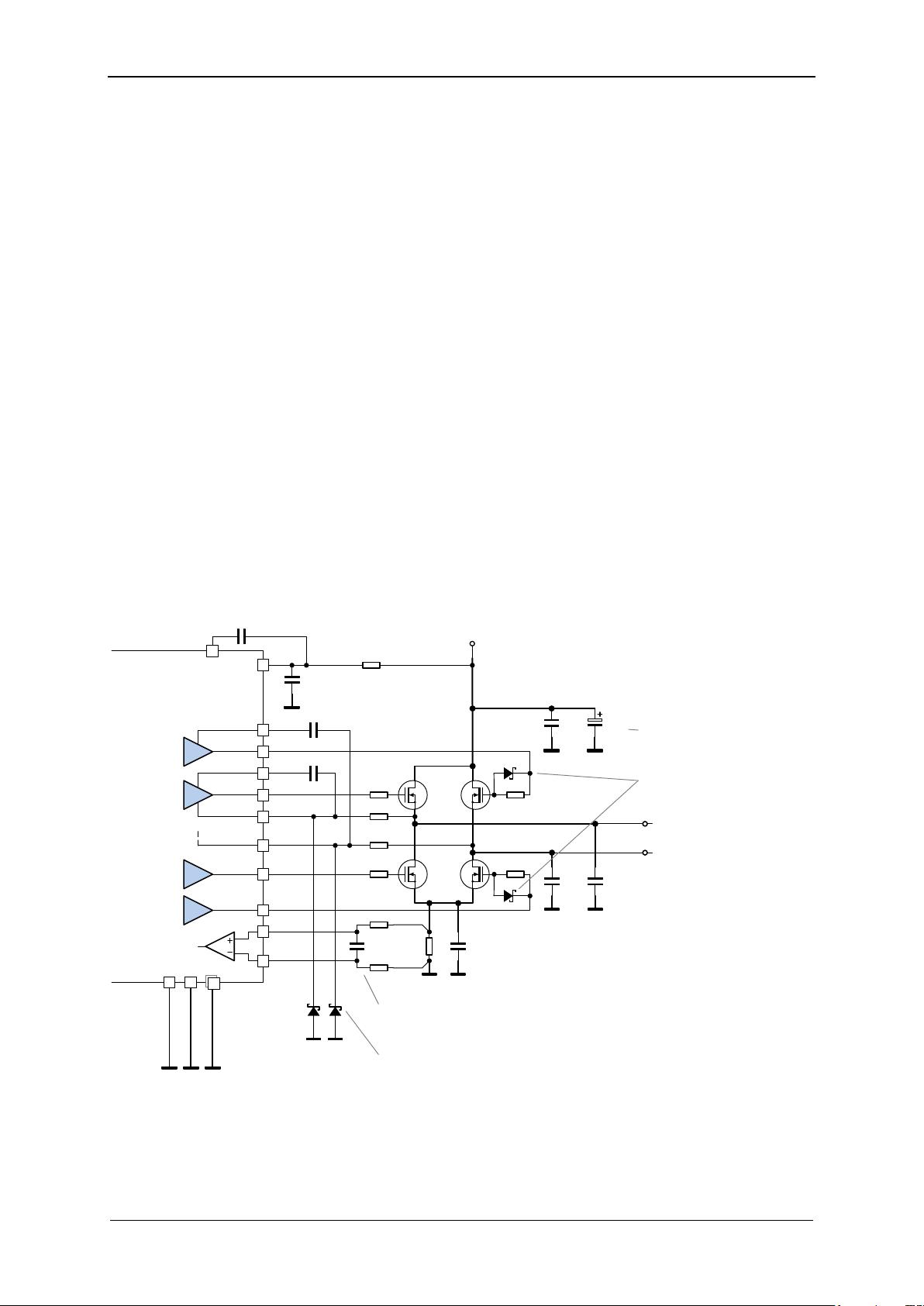
3.2 External Gate Voltage Regulator
At high supply voltages like 48V, the internal gate voltage regulator and the internal 5V regulator
have considerable power dissipation, especially with high MOSFET gate charges, high chopper
frequency or high system clock frequency >12MHz. A good thermal coupling of the heat slug to the
system PCB GND plane is required to dissipate heat. Still, the thermal thresholds will be lowered
significantly by self-heating. To reduce power dissipation, supply an external gate driver voltage to the
TMC5160. Figure 3.2 shows the required connection. The internal gate voltage regulator becomes
disabled in this constellation. 12V +/-1V are recommended for best results.
5V Voltage
regulator
+V
G
5VOUT
VSA
2.2µ
VCC
2.2µ
12V Gate Voltage
2R2
470n
11.5V Voltage
regulator
12VOUT
Figure 3.2 External gate voltage supply
Hint
With MOSFETs above 50nC of total gate charge, chopper frequency >40kHz, or at clock frequency
>12MHz, it is recommended to use a VSA supply not higher than 40V.

剩余133页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
6110 浏览量
642 浏览量
3291 浏览量
241 浏览量
2024-10-18 上传
241 浏览量


cat_milk
- 粉丝: 138
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- talks:我讲过的各种演讲的幻灯片和资料
- ColorRampGenerator:色带生成器
- 具有dnssec支持的重要隐私,快速递归的dns解析器服务器-Golang开发
- ASP人才网内容管理系统(源代码+论文).zip
- 梅吉特
- Google浏览器安装包
- favicon-badge:一个Polymer元素,用于使用动态设置的数字声明式更新Webapp的favicon。
- react-way-immutable-flux:使用ES6,Immutable.js和Flux的React.js方法
- Trubble
- testina
- uskzvqgn.zip_相位跟踪
- my-plugin-manager:用于WordPress主题或插件的嵌入式脚本,为您的用户提供一个界面,以管理您建议与产品一起使用的插件
- 用数组实现一个线性表.zip
- Gx00_83-05-33-SNMP.zip
- imersaodev-conversoranosluz:每天从法拉利岛(Códigofeitotambémna1ª)出发。 Us programa em que quee convert anos luz emquilômetrose assim poder saber adistânciade planetas e astros
- [Android实例] Android 竖着的SeekBar.rar
