受控线性多体系统传递矩阵法及其动力学分析
需积分: 9 72 浏览量
更新于2024-08-12
收藏 365KB PDF 举报
"该文章是2006年发表在《振动与冲击》期刊第25卷第5期的一篇工程技术论文,由陆卫杰等人撰写。文章主要探讨了受控线性多体系统的稳态运动分析,通过建立传递矩阵法来解决这类问题。"
在多体系统动力学的研究中,受控线性多体系统的稳态运动是一个关键的议题。传统的传递矩阵法,源于Pestel在1963年的经典工作,已经被广泛应用在各种科技领域,包括多体系统动力学。这种方法因其高效性,被广泛采用来分析链式结构的固有振动特性和稳态响应。然而,将这种技术扩展到受控系统则相对较少。
陆卫杰等人的研究提出了一种受控线性多体系统传递矩阵法,针对简单的受控多体系统,他们构建了控制力作用下集中质量和弹簧阻尼铰的扩展传递矩阵和传递方程。这种方法的独特之处在于,它不需要在状态矢量和传递矩阵中添加新的元素来表示控制信号,因此可以直接应用于受控线性多体系统的动力学分析。
与传统的牛顿法相比,受控线性多体系统传递矩阵法在计算受控多体系统的稳态响应时,保持了传递矩阵法的诸多优点,如过程简洁、计算量小、精度高以及易于程序化。通过对两个受控多体振动系统的实例计算,该方法的有效性和准确性得到了验证,与牛顿法的结果对比显示出了良好的一致性。
此外,该文指出,对于受控多体振动系统,可以通过将控制元件视为多体系统的一部分,并构建相应的传递方程和矩阵,然后利用处理闭环多体系统的方法来解决稳态响应的问题。这种方法的适用性使得受控系统的动力学分析变得更加直接和便捷。
这篇文章为受控线性多体系统的动力学分析提供了一个创新且高效的工具,有助于在兵器、航空航天、汽车、机器人、机械等领域中优化动态性能设计,解决了在这些行业中求解复杂系统稳态响应的挑战。
振 动 与 冲 击
第 25 卷 第 5 期 JO U R N A L O F V IB R A TIO N A N D SH O C K V ol.25 N o.5 2006
受控线性多体系统传递矩阵法
收稿日期: 2005 - 08 - 16 修改 稿收到 日期 :2005 - 10 - 10
第一作者 陆卫杰 男,博士,研究员,1964 年 2 月 生
陆卫杰 芮筱亭 贠来峰 何 斌 杨富锋
(南京理工大学,南京 210094)
摘 要
受控线性多体系统的稳态运动是多体系统动力学的重要研究内容之一。本文以简单的受控多体系统为
例,建立了受控线性多体系统传递矩阵法,能方便快捷地求解受控线性多体系统的稳态运动。建立了控制力作用下集中
质量和弹簧阻尼铰的扩展传递矩阵和扩展传递方程。将牛顿法和受控线性多体系统传递矩阵法的计算结果进行了比较。
实例表明,受控线性多体系统传递矩阵法不仅能用于受控线性多体系统的动力学分析,而且完整地保持了传递矩阵法的
所有优点。
关键词: 传递矩阵法,多体系统,动力学,稳态响应,振动,控制
中图分类号: TB123;O 326 文献标识码:A
0 引 言
自 Pestel于 1963 年建立经典的传递矩阵法
[1]
,用
于计算链式结构的固有振动特性和稳态响应以来,传
递矩阵法已广泛应用于许多科技领域,并被推广到多
体系统动力学研究
[2 - 6]
。在兵器、航空、航天、汽车、机
器人、机械等行业中,为使所设计的机械或结构具有良
好的动态性能,求解各种复杂机械系统的稳态响应非
常重要。近年来,多体系统传递矩阵法在兵器领域得
到了长足的发展,效果颇好
[2 - 4]
。
文献[7]把控制信号作为状态矢量的元素,将传递
矩阵法推广应用到受控链式多体系统,用于受控多跨
机械臂的振动模态分析。本文提出的受控线性多体系
统传递矩阵法,在状态矢量和传递矩阵中无需增加对
应于控制信号的新元素,使传递矩阵法直接用于求解
受控线性多体系统的稳态运动。
对于受控多体振动系统,只要把受控元件作为多
体系统的特殊元件,建立其传递方程和传递矩阵,把控
制回路作为特殊的闭环,就可按照对含有闭环多体系
统的处理方法来解决这种系统的稳态响应求解问题。
用受控线性多体系统传递矩阵法实例计算了两个受控
多体振动系统的稳态响应,并与牛顿法结果进行了对
比,结果表明,用受控线性多体系统传递矩阵法求解受
控多体系统的稳态响应,保持了传递矩阵法过程简单、
直接,计算量小,精度高,程式化和易编程等优点。且
无需建立系统的总体动力学方程,尤其对于简单受控
系统,只需通过矩阵的代数运算,就能够得到稳态运动
的解析表达式。
1 受控系统的动力学模型
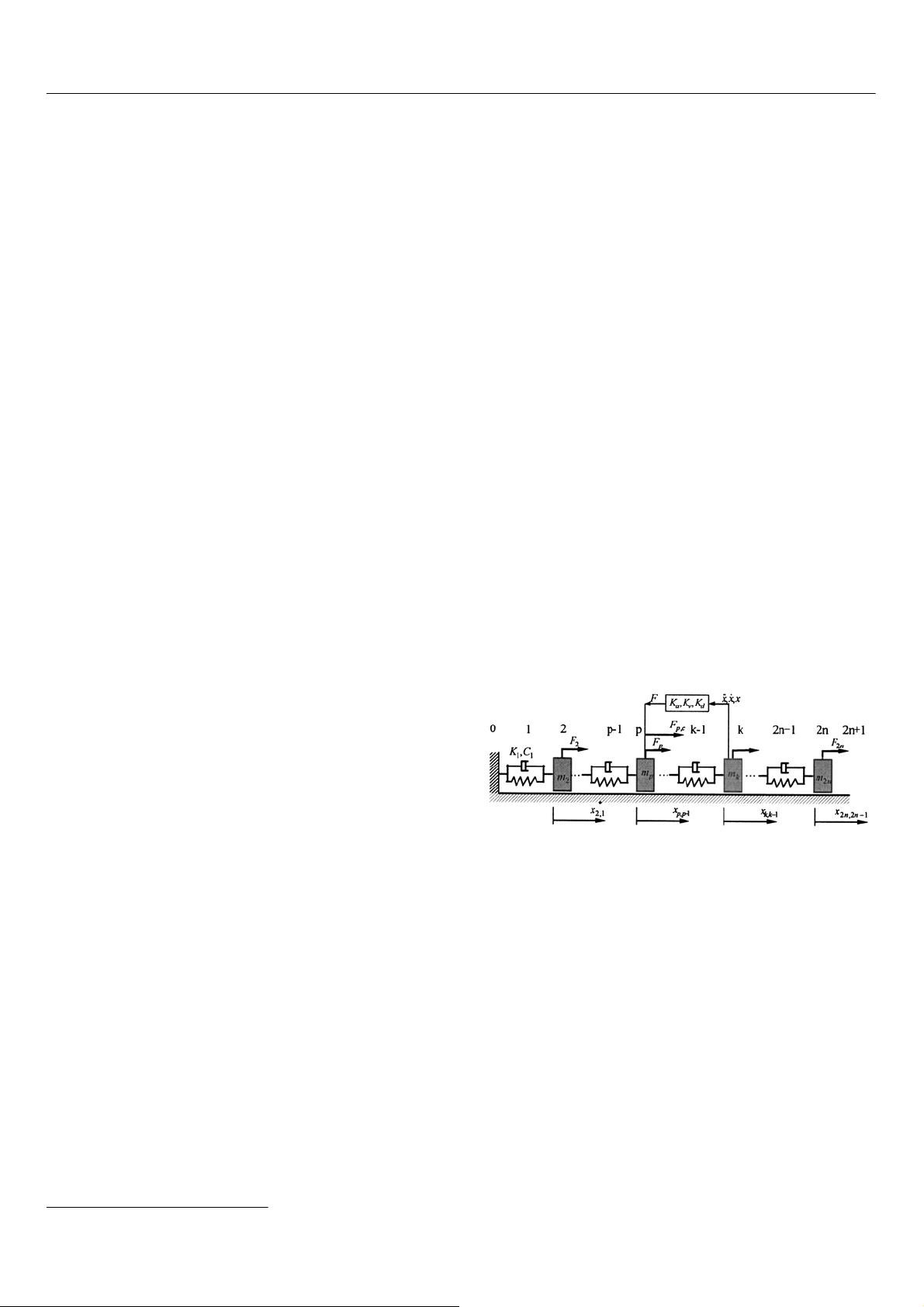
图 1 所示的由若干个集中质量和弹簧阻尼铰组成
的受控多体振动系统,在简谐力的作用下作稳态振动。
用K
j
,C
j
(j= 1,3,…,2n - 1) 分别表示弹簧阻尼铰 j的
弹性系数和粘性阻尼系数,用 m
j
( j= 2,4,…,2n)表示
集中质量的质量。简谐外力 F
j
的频率为 Ω,作用在集
中质量 m
j
上,可写为
F
j
=F
c
j
cosΩt + F
s
j
sin Ωt(1)
图 1 受控多体振动系统
控制系统的传感器通常装在某个集中质量 m
k
上,
控制系统产生的控制力作用于集中质量 m
p
上,即
F
p,c
=-K
a
x
k,k-1
-K
v
x
·
k,k-1
-K
d
x
k, k- 1
(2)
K
a
,K
v
,K
d
分别为控制系统的加速度、速度和位移控制
常数。需要指出,大多数实际控制系统是不实施加速
度控制的。对不实施加速度控制的受控系统,只是本
方法在 K
a
= 0 时的特例。若不考虑控制系统的时间滞
后,则控制力是系统当前状态的函数。这样的控制力
使元件 k 和元件 p 之间形成了一个特殊的闭环,因此一
般情况下受控多体系统都可视为含有闭环的系统。对
于通常的含有闭环的系统,多体系统传递矩阵法的处
理办法是把分叉处的元件作为多端输入一端输出元件
或一端输入多端输出元件,沿闭环或传递方向列写传
递方程后在分叉处根据位移连续和力平衡条件再列写
补充方程。但在图 1 所示的受控系统中,处理方法将
下载后可阅读完整内容,剩余3页未读,立即下载
2008-10-01 上传
2021-09-25 上传
253 浏览量
2023-06-13 上传
187 浏览量
2023-06-09 上传
141 浏览量
115 浏览量
122 浏览量

weixin_38698149
- 粉丝: 5
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- AN1299_Source_Code_dsPIC33CK256MP508_MCLV_MCHV_PLL_ESTIMATOR.zip
- 算法问题:存储我解决的部分算法问题
- Examcookie-crx插件
- 篮球赛工作总结下载
- movie-frontend
- l love youc#版.zip
- 下周:App ECOLETA,下周火箭比赛
- 公益小站-crx插件
- java版sm4源码-alg-sm2-demo:SM2密码算法JAVA调用演示程序
- java se写的坦克游戏.zip
- 小学2013年工作总结
- upptime:Ne Neal Daringer的正常运行时间监视和状态页面,由@upptime提供支持
- local-stack-demo-service
- spring图书管理系统.zip
- ProCyclingStats:从ProCyclingStats网站下载车手统计信息
- Kaggle_Otto_Product_Classification:Kaggle Otto Group 产品分类
