MuJoCo与Robot Learning:32篇精华实操与资源分享
版权申诉
Robot Learning_32是一个实用知识库,涵盖了机器人学习领域的多个重要主题。它以MuJoCo的机器人建模为核心,这是一个广泛应用于强化学习研究的仿真平台,因其丰富的3D模型库和易用性而受到青睐。文章首先介绍了在MuJoCo中如何进行基础的机器人模型构建,包括常见机器人的设定和使用方法。
第1篇详细探讨了如何利用MuJoCo对各种机器人(如腿部、机械臂等)进行精确建模,这对于理解和优化机器人的运动控制至关重要。此外,文章还提到了MuJoCo官方论坛作为寻求特定模型支持的重要资源,如果预设模型不能满足需求,开发者可以学习如何自定义模型。
除了MuJoCo,资源还包括了Reinforcement Learning(RL)的学习笔记,分别从MATLAB的角度深入剖析了RL算法的应用,这对理解RL理论及其在机器人控制中的实践具有重要意义。第3篇对比了不同的Robot Learning框架,帮助读者评估并选择最适合他们项目的工具和技术。
Sim2Real问题是研究的关键环节,涉及如何将从模拟环境中学到的行为转移到实际物理世界。第11篇到第16篇深入讨论了Sim2Real问题的不同解决方案和挑战,比如Pieter Abbeel的Covariant公司的新进展,以及如何通过深度RL解决自动驾驶的自主驾驶问题。
波士顿动力的Spot机器人和DeepMind的dm_control库也得到了提及,展示了最新技术和研究动态。GymFetchRoboticsEnvironments和IsaacGym提供了多样化的机器人学习环境,有助于开发者的实验和研究。
本文还关注了软体仿生机器人和软件模拟器(如Unity3D和MuJoCo结合)的最新进展,以及像GymFetch这样的具体环境设置。最后,有专门的文章概述了机器人抓取等操作的Manipulation领域,以及ICRA 2020年关于GOSEEK-Challenge的比赛情况。
整个知识库不仅提供了技术指导,也反映了当前Robot Learning领域的热点话题和研究前沿,对于那些希望在这个领域深入学习和实践的开发者来说,是一个宝贵的学习资源。通过关注微信公众号robot_learning123,用户可以获取更多实时的技术分享和交流机会。
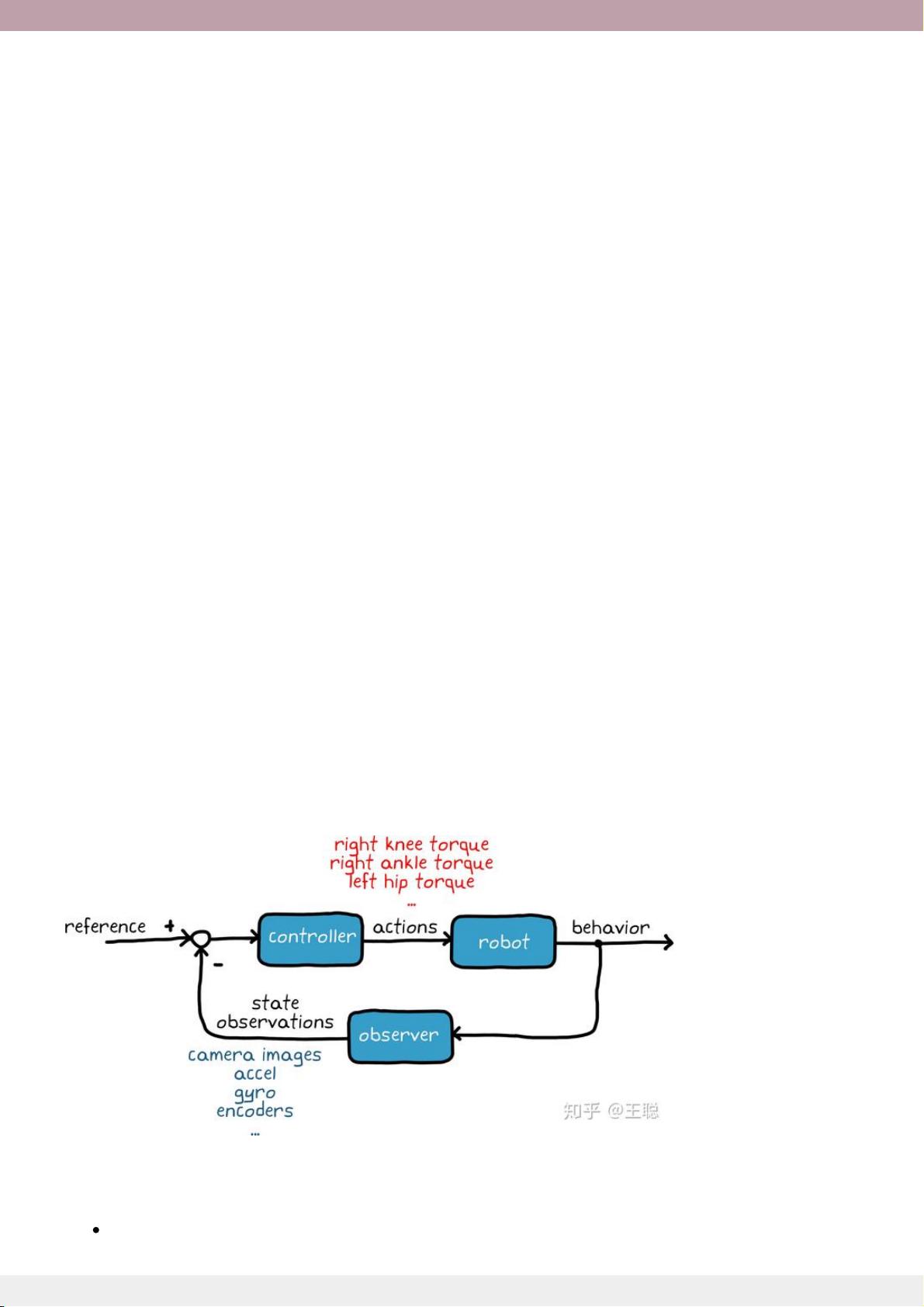
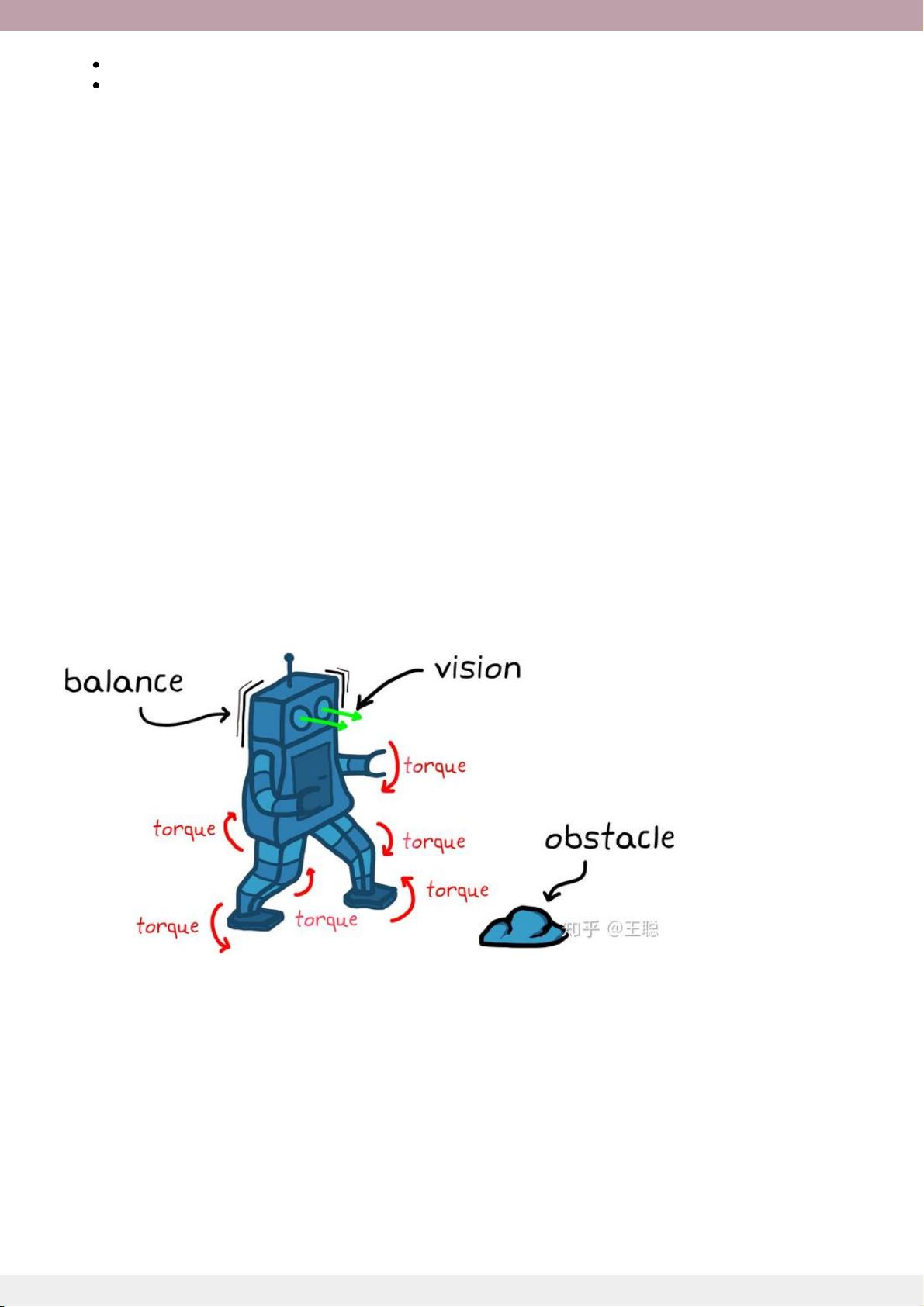
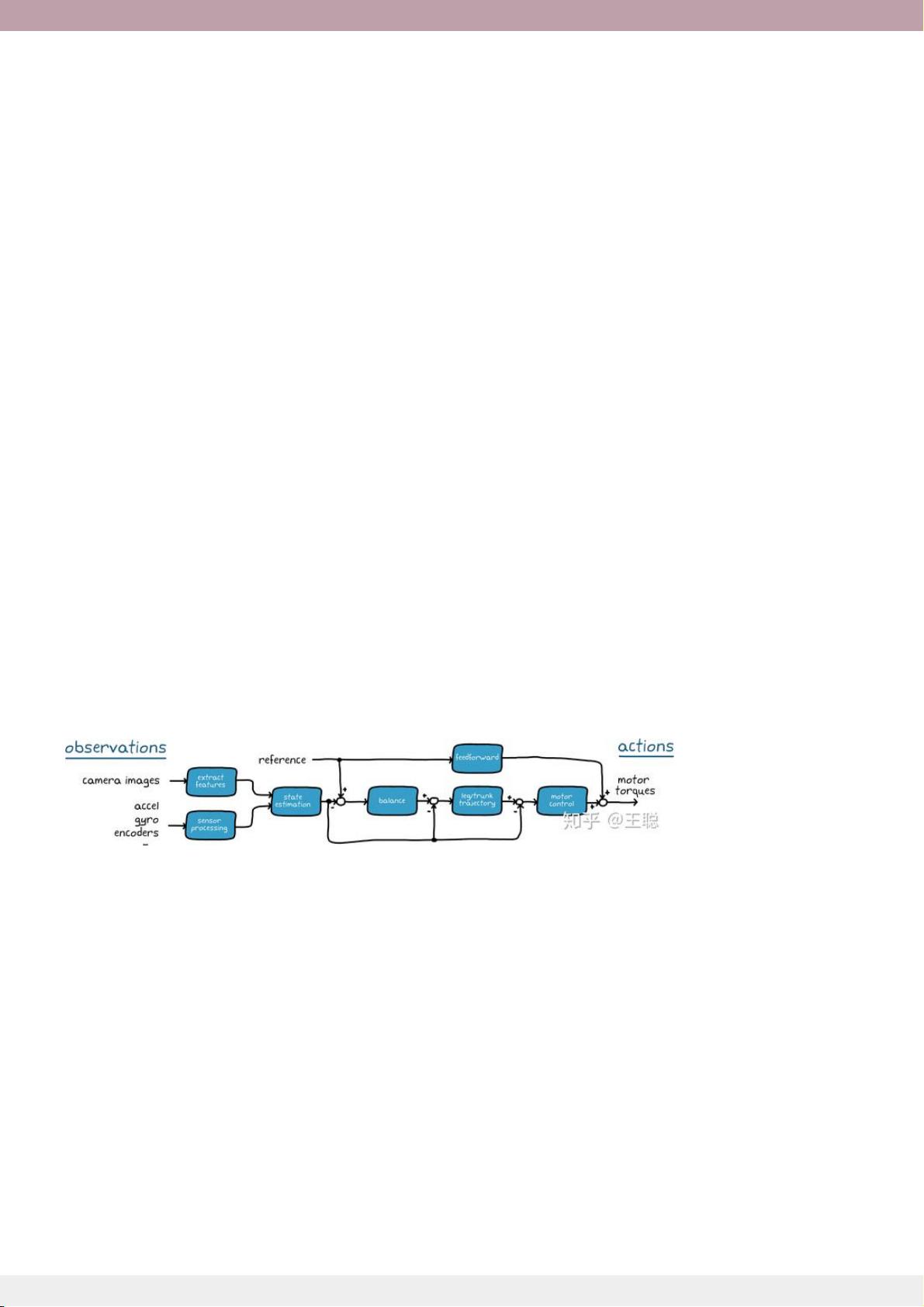
设计的控制器必须满足多种要求:
正确规划每一个电机的控制力矩来使机器人能够行走与保持平衡
第2篇 [Reinforcement Learning with MATLAB]学习笔记[1]
第 14 页 /共
166 页


剩余167页未读,继续阅读
2023-12-16 上传
2023-06-05 上传
2023-07-12 上传
2023-06-09 上传
2023-06-03 上传
2023-03-30 上传
2023-06-05 上传
2023-06-13 上传

北极象
- 粉丝: 1w+
- 资源: 377
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
