机动目标跟踪与反跟踪:相关系数算法研究
版权申诉
148 浏览量
更新于2024-07-04
收藏 2.1MB PDF 举报
"这篇文档详细探讨了机动目标的跟踪与反跟踪策略,涵盖了多传感器目标跟踪、单传感器多目标跟踪以及针对高速高机动目标的特殊处理。文档涉及的主要知识点包括坐标系转换、Kalman滤波、多传感器信息融合、航迹起始算法、航迹关联方法以及针对初始阶段滤波误差的优化策略。"
1. **坐标系转换**:文档提到了多种坐标系的转换,包括站心球坐标系ρθϕ、站心直角坐标系xyz、球心直角坐标系XYZ以及大地坐标系LBH。在分布式多传感器目标跟踪中,这些转换对于协调不同传感器的数据至关重要。
2. **Kalman滤波**:在在线跟踪和非在线跟踪两种模式中,都应用了Kalman滤波作为基础的跟踪算法。Kalman滤波是一种有效的状态估计工具,能处理动态系统中的不确定性,对目标状态进行连续估计。
3. **机动跟踪模型**:文档中提到了两种机动跟踪模型,即Singer模型和修正的当前模型。Singer模型用于描述目标的非线性运动,而修正的当前模型则更适应快速变化的目标状态。
4. **多传感器信息融合**:在统一坐标系下,通过加权融合原则实现多传感器观测数据的融合,提高了跟踪的精度和鲁棒性。
5. **航迹关联**:针对单传感器多目标跟踪,文档介绍了直观法和两种航迹关联算法——最近邻域算法与Kalman滤波航迹关联。最近邻域算法基于观测特征进行关联,而Kalman滤波航迹关联则结合目标的状态估计进行关联,尤其适用于目标轨迹交叉的情况。
6. **初值优化策略**:针对初始阶段滤波误差,文档提出了基于初值的Singer模型Kalman滤波,通过调整初值来改善滤波效果,确保对高速高机动目标的准确跟踪。
7. **目标特性估计**:通过滤波结果,可以估计出目标的速度峰值和加速度峰值,帮助判断目标的机动特性,例如高速高机动飞行器。
8. **数据关联的相对规律性考虑**:在问题4中,提到针对Data3中目标运动的相对规律性,可能采用了特定的数据关联策略,但具体方法未详述。
总结,这篇文档深入探讨了机动目标跟踪的各种技术,从基本的跟踪算法到高级的滤波和信息融合策略,为解决实际的跟踪问题提供了理论和技术支持。
9
图 4 坐标系转换流程
4
5
-2.588
-2.586
-2.584
-2.582
-2.58
-2.578
x 10
6
4.052
4.054
4.056
4.058
4.06
4.062
4.064
x 10
6
4.165
4.17
4.175
4.18
x 10
6
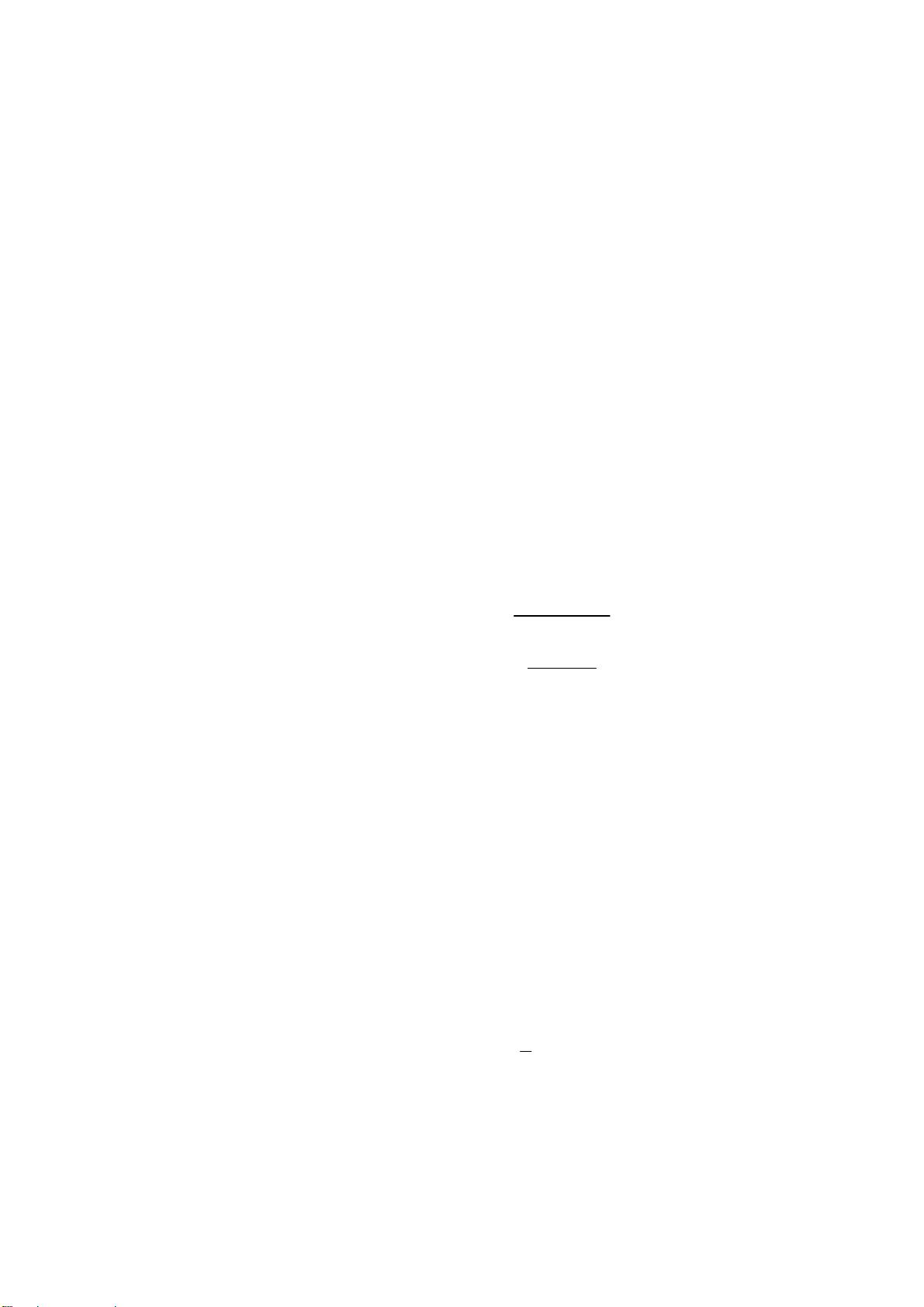
X /m
Y /m
Z /m
1
2
3
图 5 多雷达单目标跟踪
4.1.3Kalman
Kalman
Kalman
(
)
(
)
(
)
(
)
(
)
(
)
1
X k F k X k G k u k V k
+ = + +
(
)
(
)
(
)
(
)
1 1 1 1
Z k H k X k W k
+ = + + + +
i
k
(
)
ˆ
X k k
(
)
(
)
(
)
(
)
(
)
ˆ
ˆ
1
X k k F k X k k G k u k
+ = +i
(
)
(
)
(
)
ˆ
1 1 1
Z k k H k X k k
+ = + +
(
)
(
)
(
)
ˆ
1 1 1
v k Z k Z k k
+ = + − +
(
)
(
)
(
)
(
)
ˆ
ˆ
1 1 1 1 1
X k k X k k K k v k
+ + = + + + +
k
(
)
P k k
(
)
(
)
(
)
(
)
(
)
'
1
P k k F k P k k F k Q k
+ = +
(
)
(
)
(
)
(
)
(
)
'
1 1 1 1 1
S k H k P k k H k R k
+ = + + + + +
(
)
(
)
(
)
(
)
' 1
1 1 1 1
K k P k k H k S k
−
+ = + + +
(
)
(
)
(
)
(
)
(
)
'
1 1 1 1 1 1
P k k P k k K k S k K k
+ + = + − + + +
图 6 Kalman 滤波流程图
剩余42页未读,继续阅读
2019-08-21 上传
2019-08-15 上传
2023-07-30 上传
2023-04-02 上传
2023-09-02 上传
2023-07-10 上传
2023-09-16 上传
2023-07-05 上传
2023-05-30 上传

普通网友
- 粉丝: 12w+
- 资源: 9195
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
