
图2-2 自主式足球机器人系统
足球机器人系统分为下面几个部分:
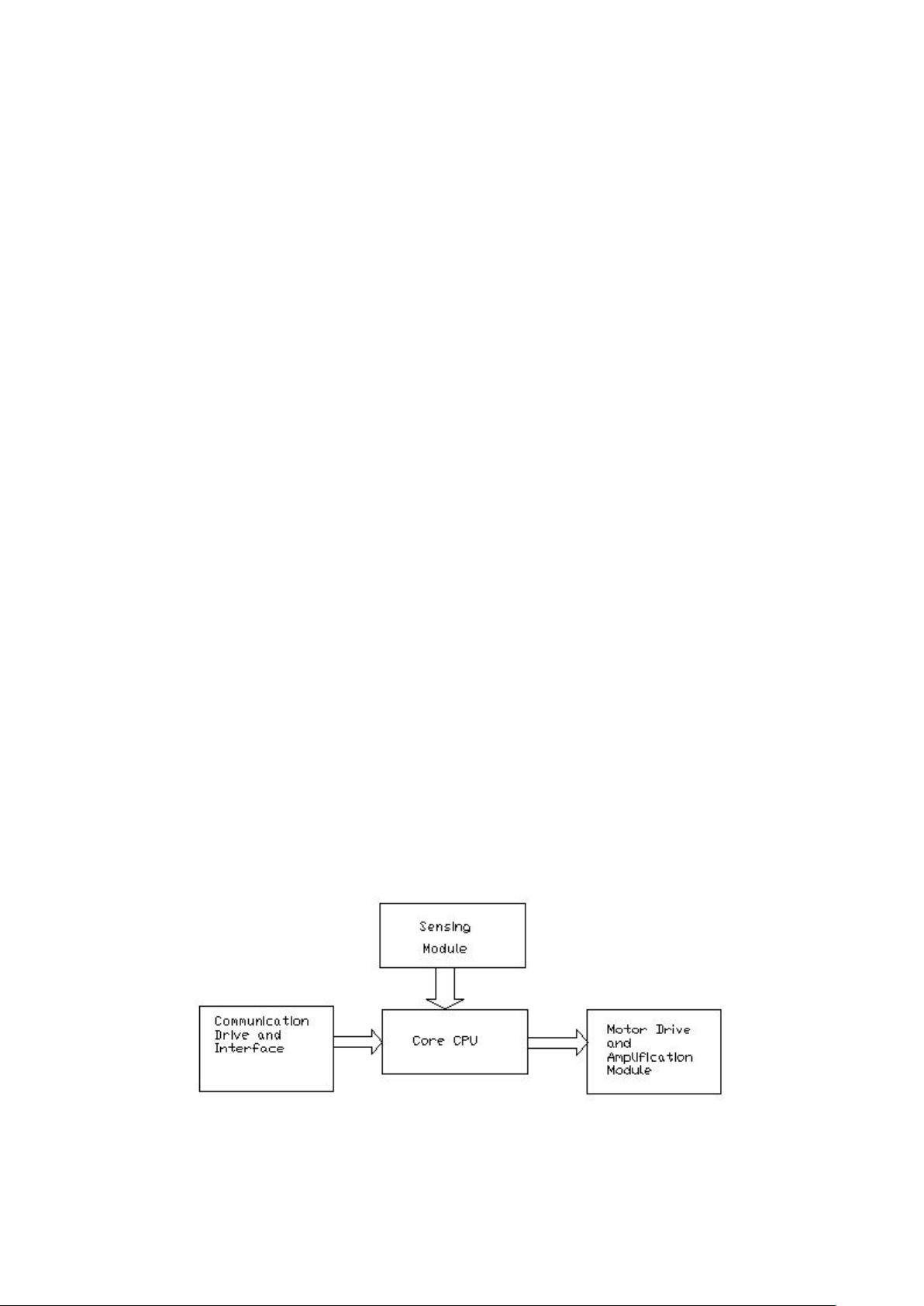
1)机器人小车子系统
2)视觉子系统
3)无线通讯子系统
4)机器人控制子系统
5)决策子系统
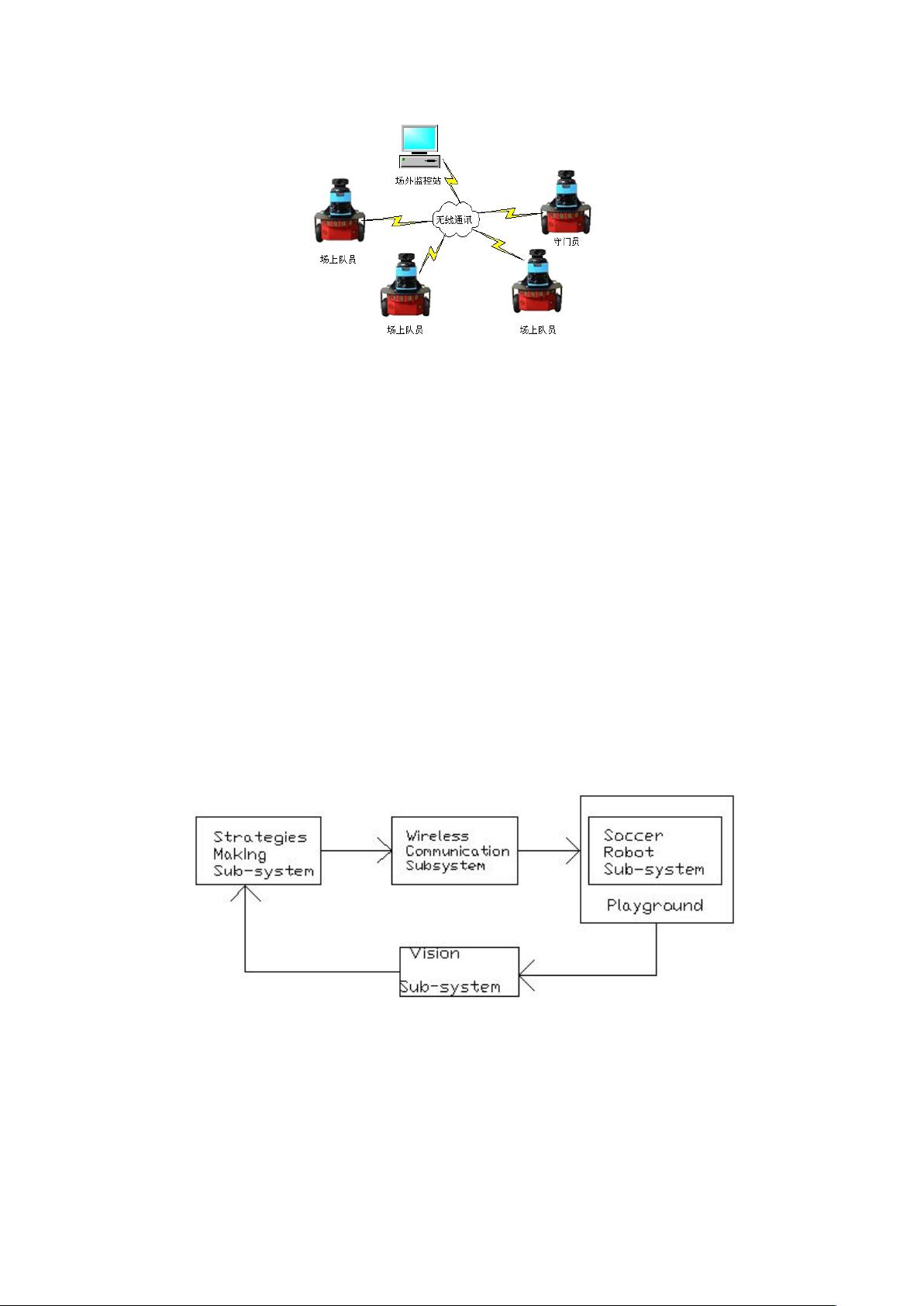
上述五个子系统构成了大的闭环系统,如图 2-3 所示。决策系统的指令通过
无线通讯系统发送给机器人小车系统,控制子系统根据指令控制机器人相应的运
动,再由视觉子系统采集场地信息,反馈给决策系统,完成闭环控制。
下面分别简要介绍各部分的组成以及系统对各部分的设计要求。
图2-3 足球机器人系统组成原理图
机器人小车子系统是比赛的本体部分,其性能的好坏直接关系到比赛的结果。
它设计的关键在于机器人的软硬件设计。
视觉子系统是整个比赛的最终检测反馈机构,它扮演机器人的“眼睛”。它
的主要任务是利用摄像头实时采集比赛场地上的图像信息,通过图像卡处理并且


剩余65页未读,继续阅读

omyligaga
- 粉丝: 60
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







