掌握现代鲁棒控制:H∞理论与实践指南
需积分: 27 124 浏览量
更新于2024-07-18
1
收藏 3.85MB PDF 举报
《鲁棒控制基础》是一本由Kemin Zhou编著的经典著作,于1999年5月出版。本书聚焦于控制系统的抗扰动与不确定性能力,这是反馈控制系统设计的核心问题。在没有外部干扰和不确定性的情况下,反馈可能并不必要。过去二十年来,控制领域的主要研究重心就是发展多变量的鲁棒控制方法,而H1稳健控制理论便是这一努力的成果。
书中概述了鲁棒控制和H∞(无穷大)控制理论的基本要素,不同于作者先前与John C. Doyle和Keith Glover合作撰写的《鲁棒与最优控制》,后者更侧重于全面介绍鲁棒和H∞控制理论,适合作为参考书。《鲁棒控制基础》则旨在作为一门多变量控制研究生课程的教学教材,其目标是简化内容并提供给实际应用中的控制工程师们使用。
本书内容包括但不限于以下知识点:
1. **基本概念**:介绍了鲁棒控制的定义和目标,即设计系统能够在面对不确定性和外部干扰时仍能保持稳定性和性能。
2. **H∞控制理论**:阐述了H∞指标,这是一种衡量系统抗扰动能力的标准,H∞值越大,系统的稳定性越强,对扰动的抑制效果越好。
3. **多变量系统处理**:针对复杂系统的控制策略,如状态空间描述、传递函数表示法,以及如何在多输入多输出系统中实现鲁棒性。
4. **设计方法**:涵盖了诸如镇定性分析、极点配置、权衡设计等实用设计技巧,帮助工程师们实际构建鲁棒控制器。
5. **案例研究与应用**:书中可能包含一系列实际工程问题的解决实例,展示鲁棒控制理论如何应用于工业界,如航空航天、电力系统、自动化生产等领域。
6. **简化教学**:考虑到读者群包括研究生和工程师,作者对复杂的理论进行了适当的简化,以便于理解和应用。
7. **实践导向**:鼓励读者将所学知识应用到实际工作中,提供了丰富的工程实践指导,以促进技术的转化和创新。
通过阅读这本书,学生和工程师不仅能掌握鲁棒控制的基础原理,还能了解到如何在现代控制系统设计中有效利用这些理论,提升系统的可靠性和稳定性。
2 INTRODUCTION
We consider mainly two types of problems:
• Analysis problems: Given a controller, determine if the controlled signals (in-
cluding tracking errors, control signals, etc.) satisfy the desired properties for all
admissible noises, disturbances, and model uncertainties.
• Synthesis problems: Design a controller so that the controlled signals satisfy the
desired properties for all admissible noises, disturbances, and model uncertainties.
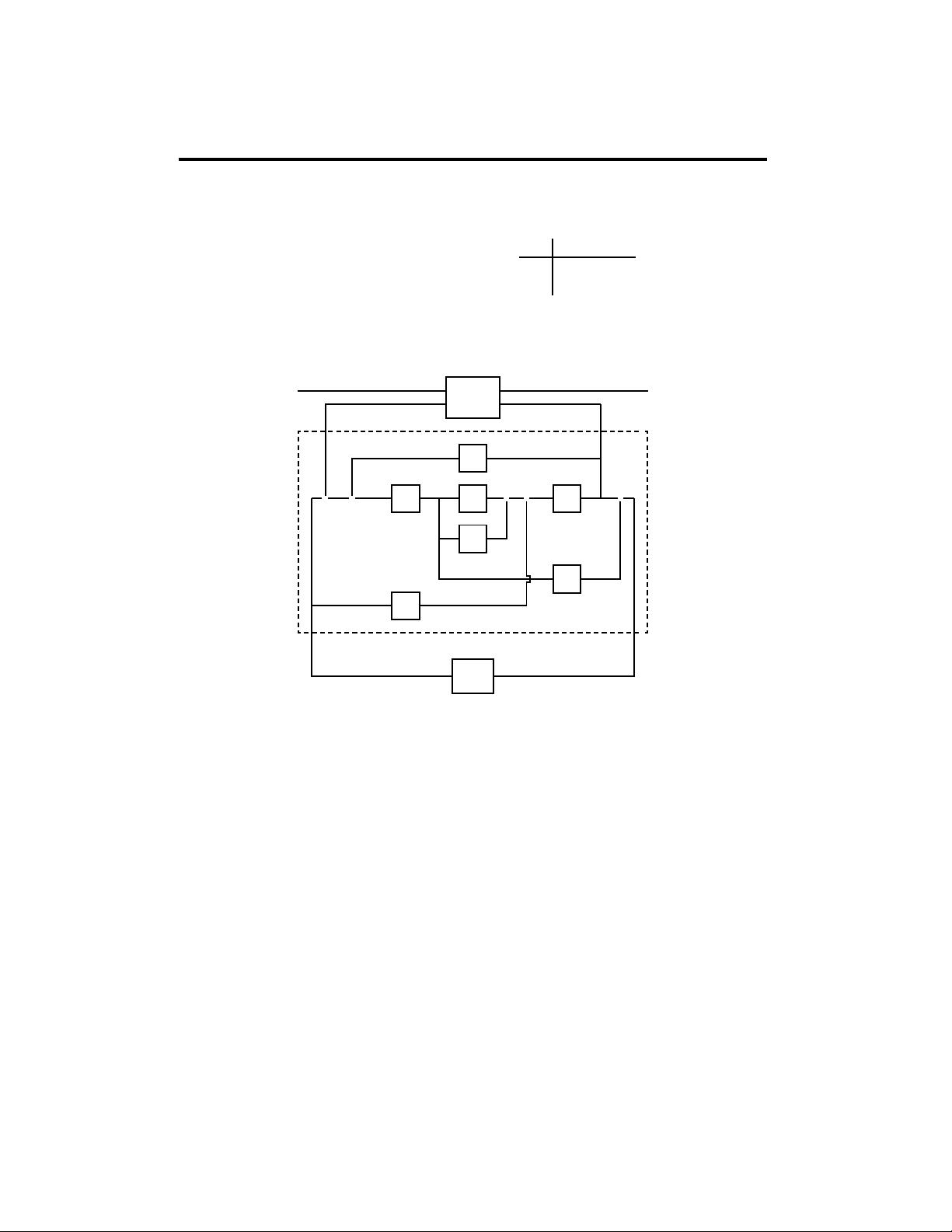
Most of our analysis and synthesis will be done on a unified linear fractional transforma-
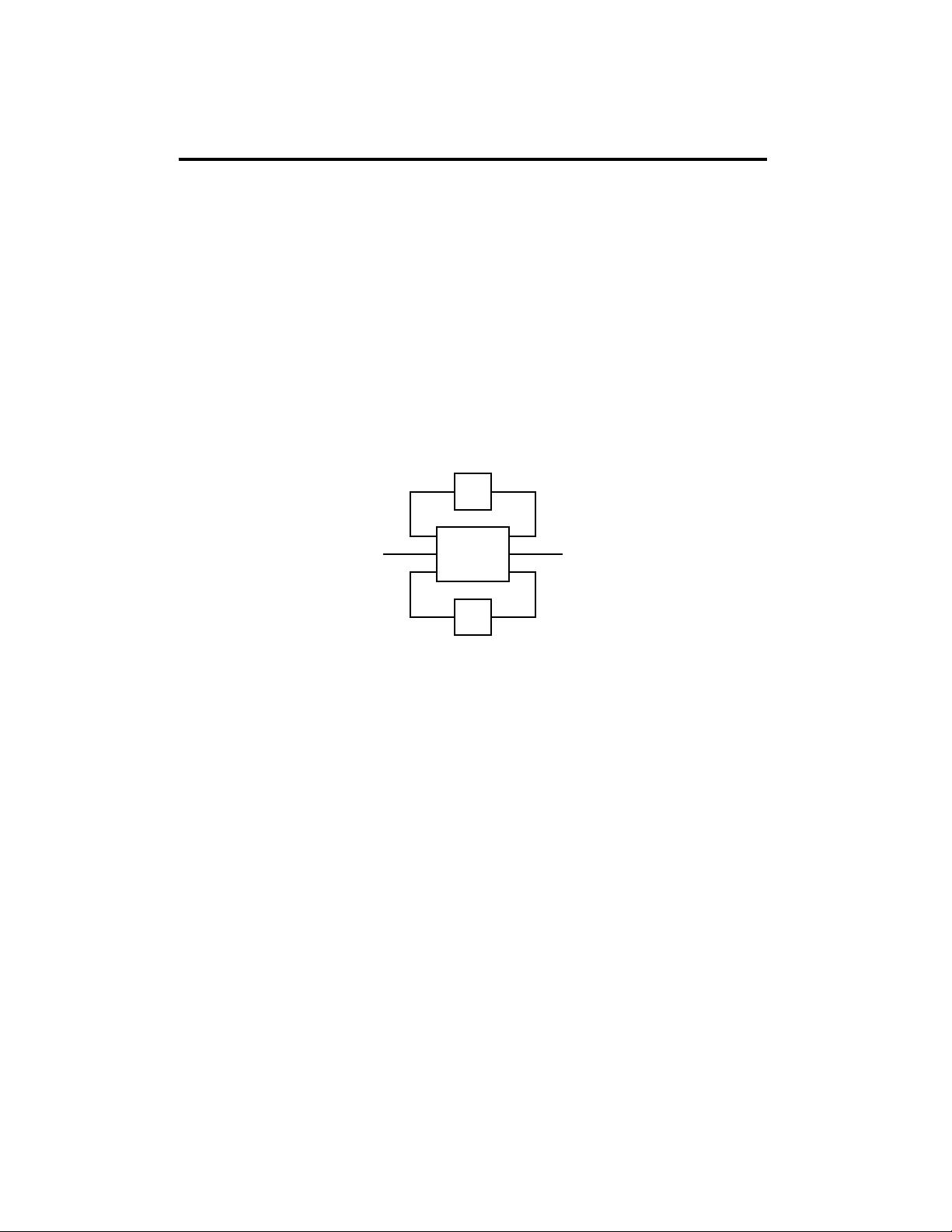
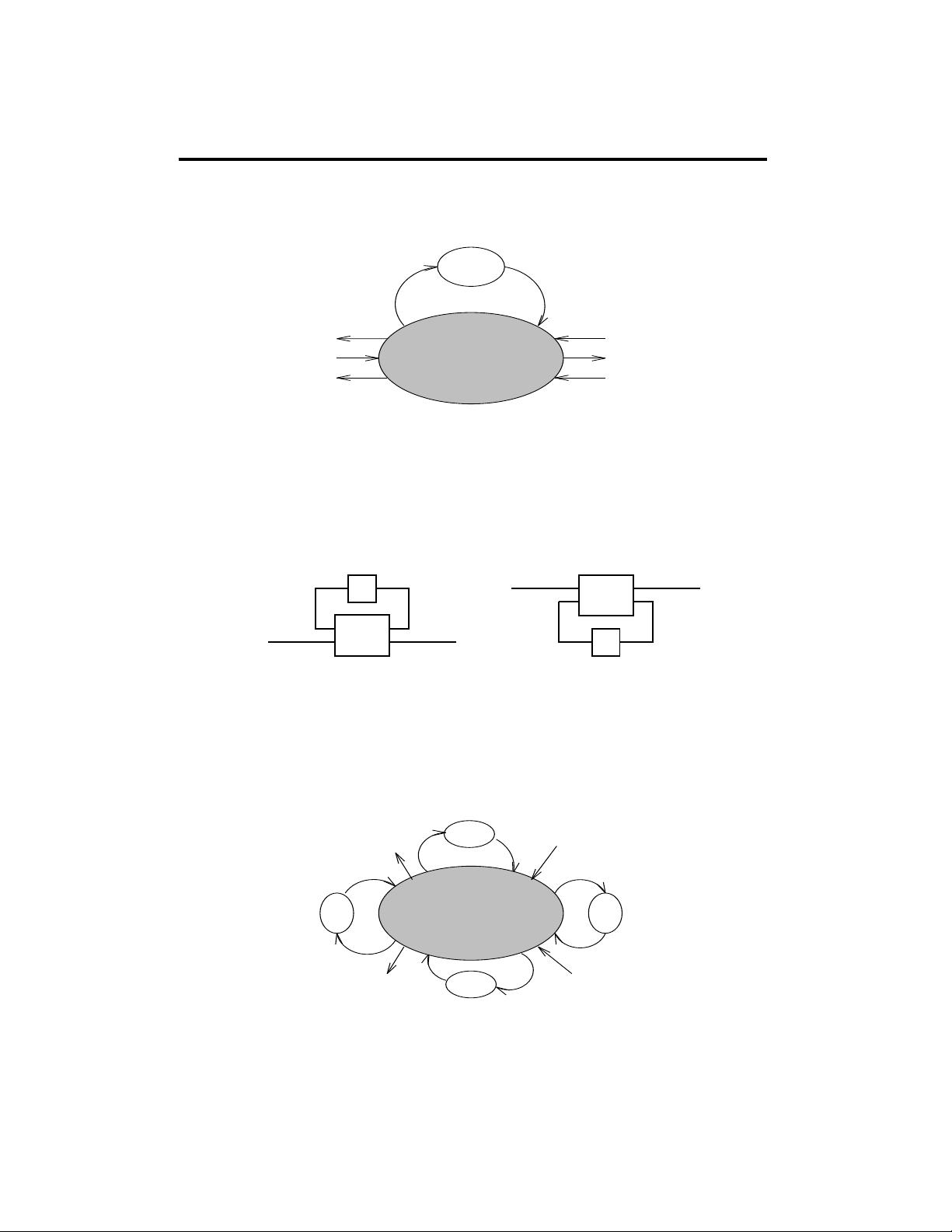
tion (LFT) framework. To that end, we shall show that the system shown in Figure 1.1
can be put in the general diagram in Figure 1.2, where P is the interconnection matrix,
K is the controller, ∆ is the set of all possible uncertainty, w is a vector signal including
noises, disturbances, and reference signals, z is a vector signal including all controlled
signals and tracking errors, u is the control signal, and y is the measurement.
wz
η
v
u
y
-
-
K
∆
P
Figure 1.2: General LFT framework
The block diagram in Figure 1.2 represents the following equations:
v
z
y
= P
η
w
u
η =∆v
u = Ky.
Let the transfer matrix from w to z be denoted by T
zw
and assume that the ad-
missible uncertainty ∆ satisfies k∆k
∞
< 1/γ
u
for some γ
u
> 0. Then our analy-
sis problem is to answer if the closed-loop system is stable for all admissible ∆ and
kT
zw
k
∞
≤ γ
p
for some prespecified γ
p
> 0, where kT
zw
k
∞
is the H
∞
norm defined as
kT
zw
k
∞
=sup
ω
¯σ (T
zw
(jω)). The synthesis problem is to design a controller K so that
the aforementioned robust stability and performance conditions are satisfied.
In the simplest form, we have either ∆ = 0 or w = 0. The former becomes the well-
known H
∞
control problem and the later becomes the robust stability problem. The two
剩余424页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2009-06-17 上传
2013-01-18 上传
221 浏览量
2009-08-16 上传
131 浏览量
2011-09-25 上传

donghanruchen
- 粉丝: 0
- 资源: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
