三角法脉冲激光雷达测距原理详解
三角法激光雷达测距原理图是一种基于脉冲测距技术的高精度传感器系统,主要应用于嵌入式系统如STM32和ARM单片机的环境中。该设计的核心原理是利用激光器发射脉冲,这些脉冲与目标物体碰撞后反射回来,被光探测器(如APD,即 avalanche photodiode)接收。通过测量从发射到接收到反射光的时间差,可以计算出物体与雷达之间的距离。
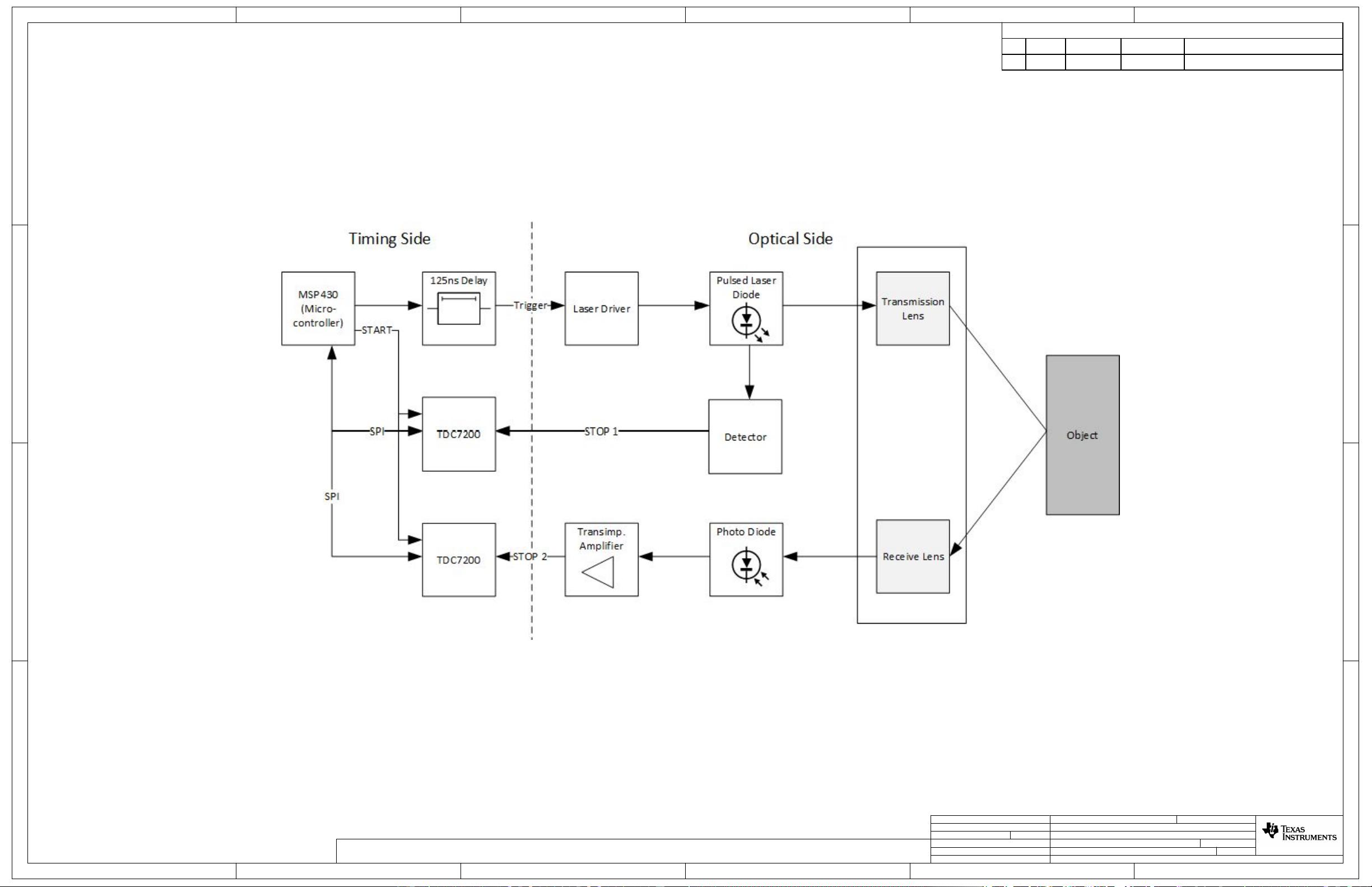
图中的电路设计分为多个部分,包括:
1. **发射模块**:这部分由激光器(可能是一个小型的激光二极管)组成,负责发射脉冲光束。STM32或ARM单片机控制激光器的开关,以实现定时脉冲发射。
2. **光学系统**:脉冲光束通过光学透镜或者反射镜组,确保光束能够准确地指向目标并反射回来。
3. **接收模块**:光探测器(APD)用于捕捉反射回来的光脉冲。当光子撞击APD时,会产生光电效应,转换为电信号。
4. **时间测量**:反射回来的光信号会在APD上产生一个电信号脉冲。这个信号经过放大、整形和时间同步处理,以便精确计算出光往返的时间,从而得到距离信息。
5. **信号处理和计算**:单片机(如STM32)接收并解析处理这些电信号,通过计时和算法计算出目标物体的距离。这通常涉及到微控制器的高级功能,如中断处理、定时器和数据处理能力。
6. **电路板布局**:图中的布局显示了各个组件在电路板上的物理位置,包括电源、接口以及连接线等,确保信号传输和功耗管理的优化。
7. **版权和警告**:图纸来自TI(Texas Instruments),强调了设计的公共发布性质,但不保证其准确性或完整性,用户需要自行验证和测试以适应特定应用。此外,电路图版本控制和修订历史也被详细记录。
这款三角法激光雷达测距原理图提供了一个基础框架,展示了如何将STM32或ARM单片机与光学部件集成,用于实时测距,广泛应用于机器人、自动驾驶汽车、无人机等领域。理解和实现这样的系统要求扎实的嵌入式硬件和软件开发技能。
1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
1 4
12/9/2016
TIDA-00663_E2_CoverSheet.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B http://www.ti.com
Contact: http://www.ti.com/support
LIDARProject Title:
Designed for: Public Release
Assembly Variant: 001
© Texas Instruments 2016
Drawn By:
Engineer: Matthieu Chevrier
Texas Instruments and/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. Texas Instruments and/or its licensors do not
warrant that this design will meet the specifications, will be suitable for your application or fit for any particular purpose, or will operate in an implementation. Texas Instruments and/or its
licensors do not warrant that the design is production worthy. You should completely validate and test your design implementation to confirm the system functionality for your application.
Version control disabledSVN Rev:
TIDA-00663Number: Rev: E2
TID #: TIDA-00663
Orderable: N/A
Revision History
Rev NotesApproved byECN # Approved Date
N/A N/A N/A N/A N/A
下载后可阅读完整内容,剩余4页未读,立即下载
2013-09-05 上传
166 浏览量
2023-08-21 上传
2022-07-04 上传
2022-11-27 上传
2022-11-23 上传
2021-10-20 上传
点击了解资源详情
点击了解资源详情

qiang6091
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
