最少拍与大林算法在计算机控制技术中的应用
版权申诉
189 浏览量
更新于2024-07-16
收藏 4.83MB PPT 举报
"该资源是一份关于计算机控制技术的PPT,主要讲解了最少拍有纹波控制系统设计和大林算法的应用。内容涉及计算机控制系统的脉冲传递函数、数字反馈系统的构成、零阶保持器的概念,以及如何设计和计算数字控制器的脉冲传递函数D(z)。此外,还介绍了闭环脉冲传递函数、误差脉冲传递函数的表达式,并给出了根据不同条件计算D(z)的方法。最后,提到了数字控制器设计的基本步骤。"
在计算机控制技术中,最少拍有纹波控制系统设计是一种常用的方法,旨在使系统在尽可能短的时间内达到期望的响应,同时减少输出的超调和振荡。这种设计通常涉及到脉冲域的分析,利用Z变换来描述数字控制系统的行为。
计算机控制系统通过脉冲传递函数(D(z)Ho(s)Gc(s))来描述其动态特性,其中D(z)代表数字控制器的脉冲传递函数,Ho(s)是零阶保持器的传递函数,Gc(s)是控制器的传递函数。e*(t)和u*(t)分别表示误差信号和控制输入,E(z)和U(z)是它们的Z变换,r(t)是参考输入,R(z)是系统的实际输出,Φ(z)是误差脉冲传递函数,G(z)是广义对象的脉冲传递函数,而C(z)是系统的闭环脉冲传递函数。
一个典型的数字反馈系统由开环脉冲传递函数G(z)和数字控制器D(z)组成,开环传递函数为D(z)G(z),闭环传递函数则为D(z)G(z)/(1-D(z)G(z))。误差脉冲传递函数E(z)/R(z)描述了系统误差与参考输入之间的关系,它是D(z)G(z)的倒数。
设计数字控制器D(z)时,需要考虑其物理可实现性和稳定性。物理可实现意味着D(z)可以通过实际的数字硬件实现,而稳定性则是保证系统长期稳定运行的关键。大林算法是一种有效的方法,用于根据给定的性能指标来设计满足这些条件的D(z)。
设计数字控制器的一般步骤包括:
1. 确定被控对象的脉冲传递函数G(z)。
2. 定义系统性能指标,如上升时间、超调量和稳态误差。
3. 计算期望的误差脉冲传递函数Φ(z)或控制器输出脉冲传递函数ΦU(z)。
4. 应用适当的控制器设计方法(如最少拍控制或大林算法)来找到满足性能指标的D(z)。
5. 检查D(z)的可实现性和稳定性,如果不符合要求,则调整控制器参数并重复步骤4和5。
通过这个PPT,学习者可以深入了解计算机控制技术中的最少拍控制理论,掌握如何设计数字控制器以实现期望的系统性能。
最少拍系统设计中必须满足准确性、快速性、稳定性和
物理可实现性的要求,下面讨论最少拍有纹波控制系统的
设计方法。
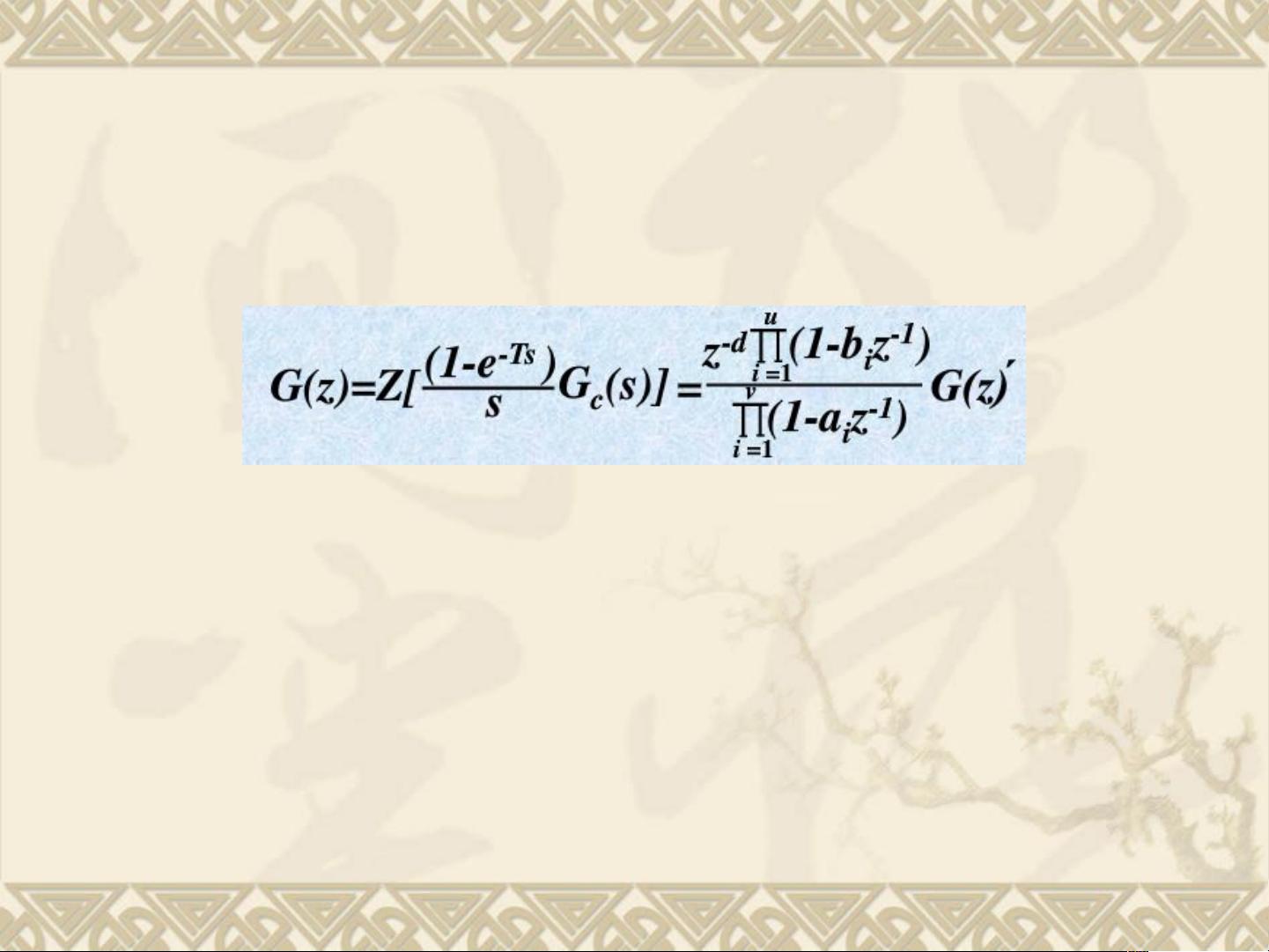
G’(z) : G(z) 中不包含单位圆上和单位圆外的零极点。
u: G(z) 中单位圆上和单位圆外的零点数。
v: G(z) 中单位圆上和单位圆外的极点数。

剩余40页未读,继续阅读
2021-10-12 上传
2021-10-11 上传
2022-01-12 上传
2023-06-10 上传
2023-05-25 上传
2024-07-16 上传
2023-05-19 上传
2023-05-11 上传
2024-04-03 上传









