STM32 Bootloader中的CAN协议详解
版权申诉
26 浏览量
更新于2024-07-19
收藏 789KB PDF 举报
"AN3154 - CAN协议在STM32自举程序中的应用"
这篇应用笔记AN3154详细介绍了STM32微控制器自举程序中使用的CAN(Controller Area Network)通信协议。STM32是意法半导体(STMicroelectronics)推出的一系列高性能微控制器,广泛应用在工业控制、汽车电子等领域。CAN协议是一种广泛用于汽车和工业自动化领域的现场总线标准,具有高可靠性和错误检测能力。
STM32自举程序是指在微控制器上电或复位时运行的一段固件,负责加载和执行主应用程序。在某些情况下,通过CAN协议与外部设备交互,可以实现远程编程、故障诊断或配置等功能。此应用笔记涵盖了支持V3.x、V7.x和V9.x自举程序的STM32产品,例如STM32F1、STM32F2、STM32F4、STM32F7和STM32L4系列的部分型号。
文档的主要内容包括:
1. **自举程序代码序列**: 这部分解释了STM32自举程序启动时执行的代码流程,包括初始化阶段、等待指令和执行指令的过程。
2. **CAN设置**: 提供了设置CAN接口以与STM32自举程序通信所需的参数和步骤,如波特率、滤波器配置等。
3. **自举程序指令集**: 详细列出了支持的CAN指令及其功能:
- **Get指令**: 获取特定信息,如设备状态或版本信息。
- **GetVersion&ReadProtectionStatus指令**: 获取自举程序的版本和读保护状态。
- **GetID指令**: 获取微控制器的设备ID。
- **Speed指令**: 设置或查询微控制器的工作速度。
- **ReadMemory指令**: 从微控制器的内存中读取数据。
- **Go指令**: 激活或开始执行指定的应用程序。
- **WriteMemory指令**: 向微控制器的内存写入数据,通常用于固件更新。
- **EraseMemory指令**: 擦除微控制器的内存区域。
- **WriteProtect指令**: 对微控制器的内存进行写保护。
- **WriteUnprotect指令**: 取消写保护,允许进行编程操作。
4. **其他信息**: 除了以上内容,文档还可能涵盖错误处理、通信安全以及如何利用这些指令与STM32自举程序进行有效的交互。
通过这份应用笔记,开发者可以深入理解如何利用CAN协议来管理和控制STM32微控制器的自举过程,从而实现更灵活的设备管理和固件更新方案。这对于需要远程编程或复杂系统集成的项目来说尤其重要。
DocID17063 Rev 1 [English Rev 6] 7/34
AN3154 CAN设置
33
随后,代码将相应初始化串行接口。使用此计算波特率向主机返回确认字节
(
0x79
)
,表明
STM32已准备接收指令。
2 CAN设置
STM32 CAN与2.0A和B(主动)规范兼容,比特率最高达1 Mbit/s。它可接收和发送包含 11
位标识符的标准帧和包含 29 位标识符的扩展帧。
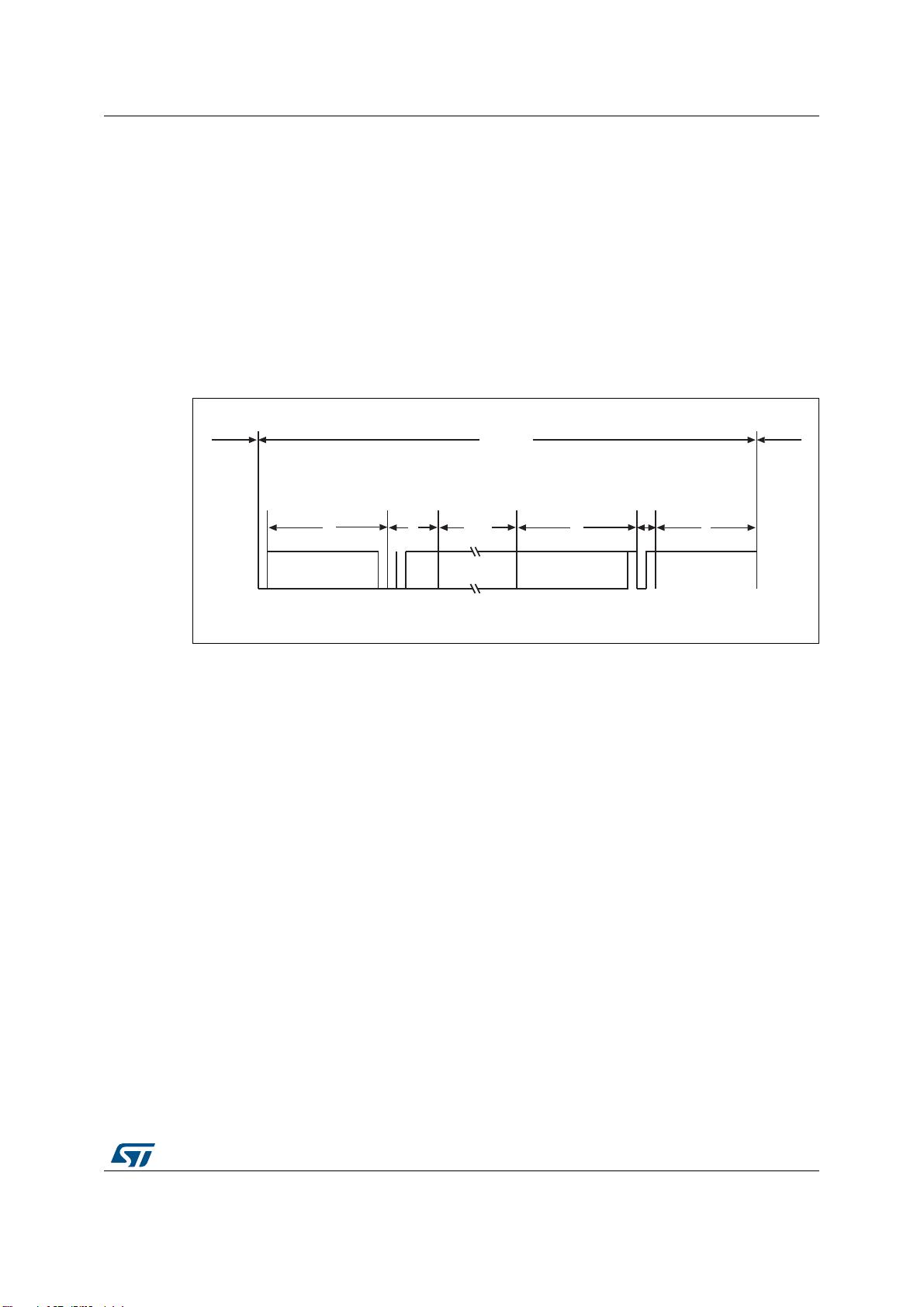
图
3显示了仅使用标准标识符的CAN帧。
图3. CAN帧
此应用中的CAN设置如下:
• 标准标识符(未延长)
• 比特率:开始时为125 kbps;运行期间可通过速度指令进行更改,以达到最大比特率1
Mbps。
发送设置(从STM32至主机)如下:
• Tx mailbox0:开
• Tx mailbox1和Tx mailbox2:关
• Tx标识符:(0x00、0x01、0x02、v03、0x11、0x21、0x31、0x43、0x63、0x73、0x82、
0x92)
接收设置(从主机至STM32)如下:
• 同步字节0x79在RX标识符而不是数据字段内。
• RX标识符取决于指令(0x00、0x01、0x02、0x03、0x11、0x21、0x31、0x43、0x63、
0x73、0x82、0x92)。
• 错误检查:如果错误字段(CAN_ESR寄存器中的[6:4]位)不是000b,则丢弃消息并向主
机发送NACK。
• 当发生FIFO过载时,丢弃消息并向主机发送NACK。
• 传入消息可包含1至8个数据字节。
注:
CAN
自举程序固件每次仅支持一个节点。这意味着固件不支持
CAN
网络管理。
ID
12
DLC
6
8 * N
CRC
16
2
7
EOF
ACK
SOF
RTR
IDE
r0
Ԩ㻷ᆍ⇫
ᆍ⇫
ᮦᦤᆍ⇫ CRCᆍ⇫
ACKᆍ⇫
ᑝ䰪グⲳ ᑝ䰪グⲳᡌ䗽䖳ᑝᮦᦤᑝδḽḽ䇼ㅜε
44 + 8 * N
ai15001
剩余33页未读,继续阅读
180 浏览量
142 浏览量
点击了解资源详情
142 浏览量
201 浏览量
1026 浏览量
132 浏览量


应用市场
- 粉丝: 952
- 资源: 4346
 我的内容管理
展开
我的内容管理
展开







