"两自由度5连杆机构的几何分析与运动学逆运动学分析"
需积分: 40 165 浏览量
更新于2023-12-28
1
收藏 529KB PDF 举报
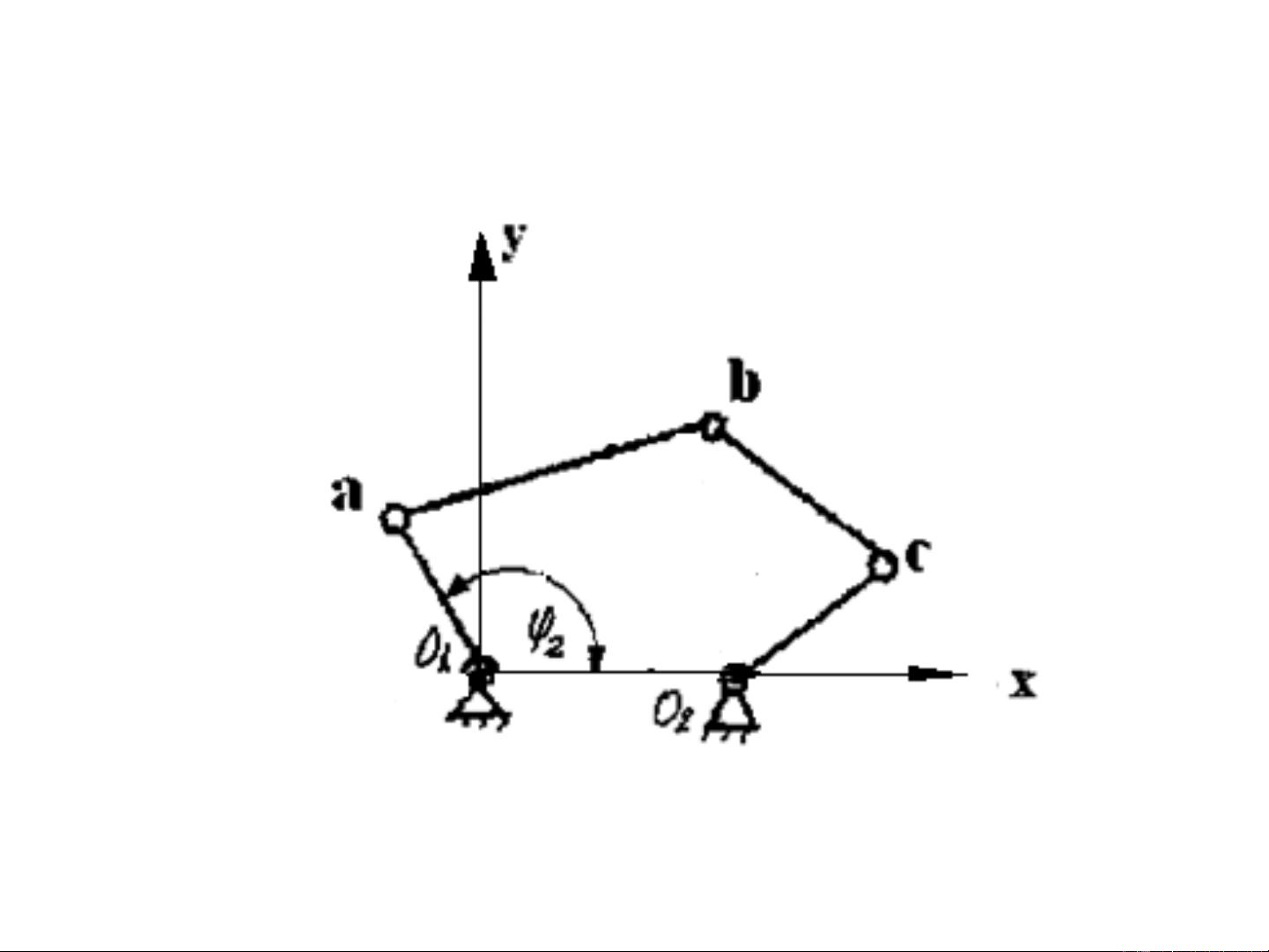
The analysis of the geometry and kinematics of a two-degree-of-freedom five-link mechanism is a fundamental aspect of many mechanical studies. In this detailed analysis, the five-link mechanism is thoroughly explored, shedding light on its intricate movements and functions.
The mechanism consists of various components, including the internal combustion engine, A-Crankshaft, B-Connecting rod, C-Slider (piston), D-Frame, and E-Valve mechanism E. These components work together to provide motion and power to the mechanism. The kinematic pairs and degrees of freedom play a crucial role in determining the mechanism's capabilities and limitations. The degree of freedom for spatial mechanism W=6n-P1-2P2-3P3-4P4-5P5, and the degree of freedom for planar mechanism W=3n-2P5.
The kinematic chains of the mechanism are also analyzed, with the four-link mechanism and five-link mechanism being the primary focus. The analysis delves into the intricacies of these chains, shedding light on their unique properties and behaviors.
Furthermore, the mechanisms used in technological machines, such as the four-link slider-crank mechanism, are examined in detail. These mechanisms are essential in various industrial applications, and understanding their operation is crucial for improving efficiency and performance.
Overall, the study provides a comprehensive and in-depth analysis of the geometry and kinematics of a two-degree-of-freedom five-link mechanism. It serves as a valuable resource for mechanical engineers and researchers, offering insights into the fundamental principles of these mechanisms and their practical applications. The thorough exploration of the various components, kinematic pairs, degrees of freedom, and kinematic chains provides a solid foundation for further studies and advancements in mechanical engineering.
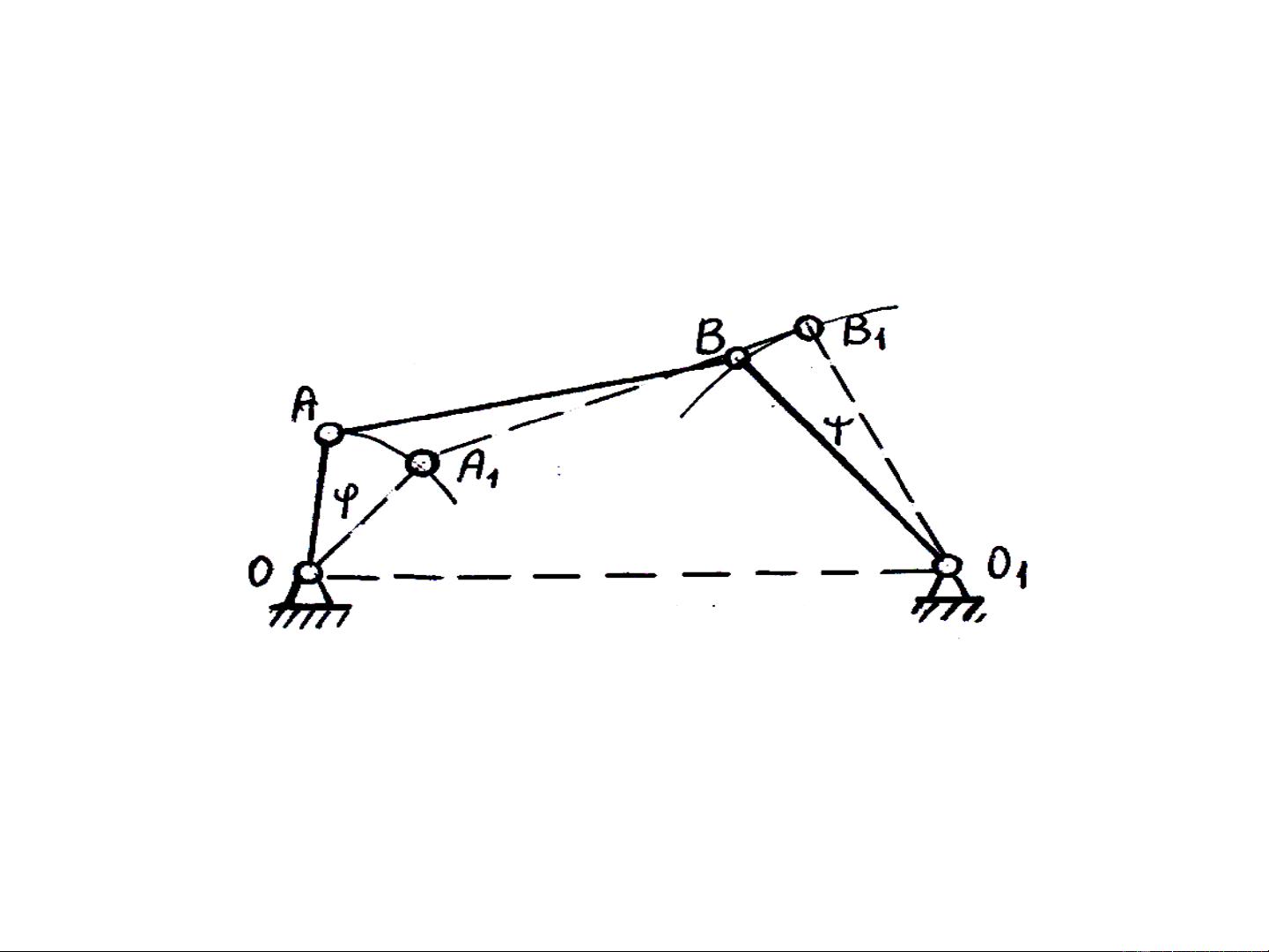
Four link mechanism
104233 =−−=w
剩余30页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-19 上传
2021-09-10 上传
2018-03-29 上传
2022-07-12 上传
2022-11-09 上传
2021-09-19 上传

pangbo1974
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
