飞思卡尔单片机自动循迹小车控制设计与实现-研究综述
53 浏览量
更新于2024-03-11
收藏 1.15MB DOC 举报
With the continuous development of electronic technology in China, automation equipment has become increasingly prevalent in our daily lives, providing a broad platform for research in embedded systems and intelligence. This project focuses on the design of an automatic line-tracking car control system using the MK60DN512VMD100 microcontroller as the core control unit. The system utilizes the OV7620 CMOS analog camera to detect track information, the TCL5510 high-speed AD conversion chip for grayscale image processing and binary conversion, and photodetector encoders to monitor the real-time speed of the car. By implementing a PID control algorithm to adjust the motor speed and steering of the servo motor, the system achieves closed-loop control of speed and direction. This project combines hardware and software components to create an efficient and effective automated control system for line-tracking cars.
基于飞思卡尔单片机自动循迹小车控制的设计
`
3
2 飞思卡尔单片机自动循迹小车系统设计总方案
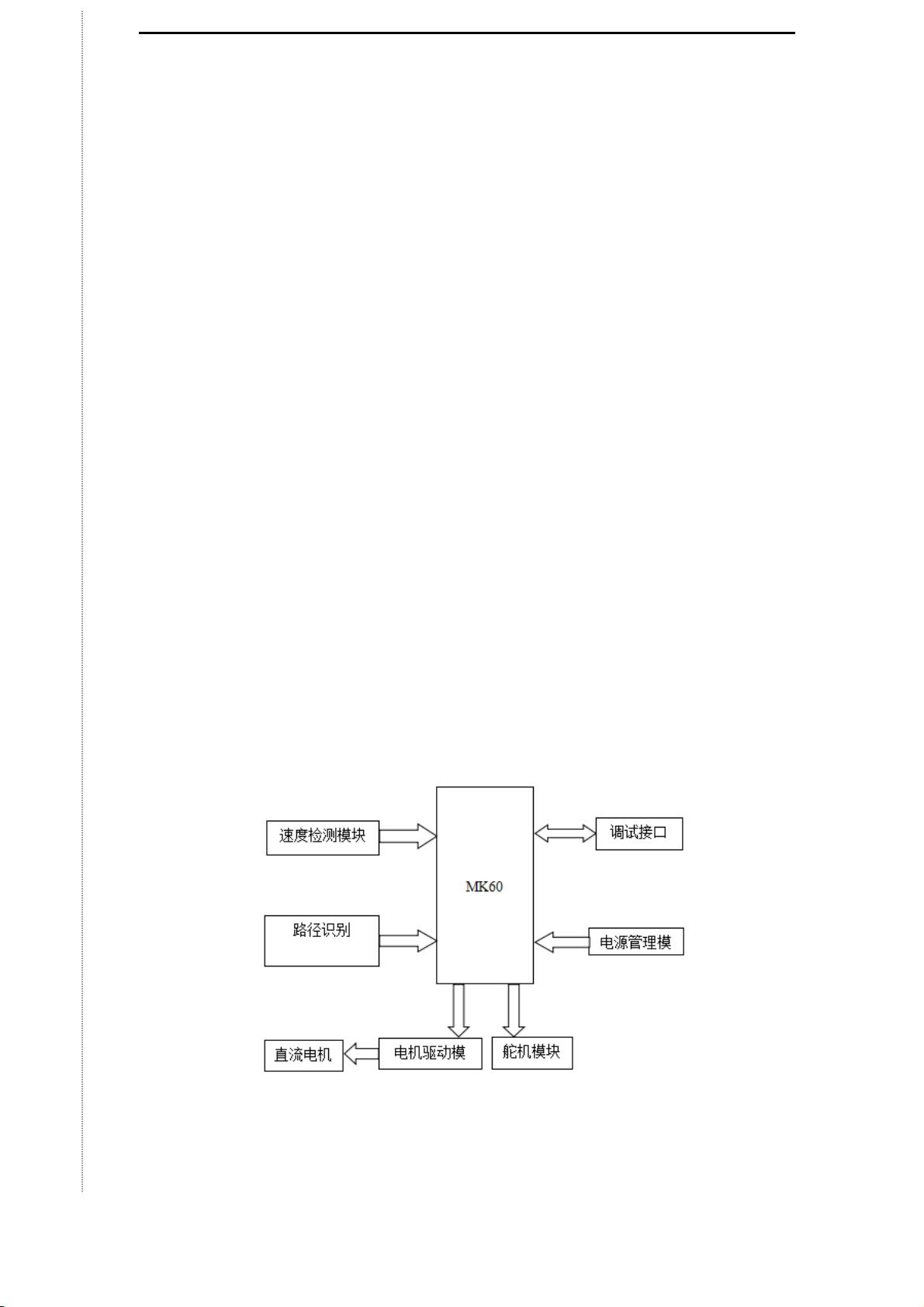
本设计的核心是基于 K60 的主控模块,车速由电机驱动模块控制、转向问题
由舵机模块来控制、小车速度的检测交由测速传感器模块的检测,预判行进的路
线由路径识别模块来决定。本设计实现的功能是在特定的跑道上小车自动行驶,
完成在转弯处减速、在直道上加速行驶。本系统由两部分组成即硬件部分和软件
部分。
2.1 系统硬件部分
本毕业设计选用飞思卡尔公司推出的 32 位 K60 微控器作为小车的核心控制
单元。路径识别模块采用摄像头检测技术,将采集到的图像信息转化成电平信号
送给微控单元 K60。同时速度检测模块收集到的信息同样转换成电平信号送给微
控单元 K60。微控单元经过内部的处理,输出 PWM 信号,控制电机转速以及舵
机转向,达到控制速度和自动行驶的目的。
要使智能小车又快又稳的行驶,不仅要控制好舵机的转向还要控制好车速。
这样才能使小车在转弯的时候不会因为速度太快而偏离跑道,因此我们需要检测
小车的速度,并且采取闭环的反馈机制。同时要求我们要将路径检测、车速控制
以及控制转向的各个单元精密结合起来。如果传感器采集到了错误的信息,或者
伺服电动机的控制出现偏差,就可能使小车出现严重的抖动,常出现的问题是小
车偏离跑道;如果直流电动机的控制效果不理想,还会造成小车速度过慢等问题。
本部小车的系统总体结构如图 2.1 所示:
图 2.1 系统总体结构图

剩余37页未读,继续阅读
109 浏览量
2023-06-28 上传
2023-07-06 上传
2023-07-09 上传
点击了解资源详情
点击了解资源详情
2021-10-02 上传

zzzzl333
- 粉丝: 832
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
