GRAPH编程与顺序控制系统解析
需积分: 42 162 浏览量
更新于2024-07-17
收藏 687KB PDF 举报
"GRAPH 顺控是一种图形编程语言,专门用于创建和设计顺序控制系统。它使得编程过程更加直观和高效,通过将复杂的流程分解为一系列具有特定功能的步骤,并定义它们之间的转换条件。在顺序控制系统中,至少包含三个关键模块:GRAPH函数块、背景数据块和调用代码块。各模块协同工作,实现预定顺序的自动化任务。
1) GRAPH函数块:
此块是实际定义顺控程序的地方,程序员在这里创建和配置各个步骤以及转换条件。每个步骤代表一个特定的操作阶段,而转换条件则规定何时从一个步骤过渡到下一个。
2) 背景数据块:
背景数据块存储顺序控制系统的参数和数据,可以与GRAPH函数块关联,以便在运行时访问和更新。系统会自动生成这些数据,用于支持整个控制系统的运行。
3) 调用代码块:
调用代码块(通常是OB、FC或FB)负责在循环中调用GRAPH函数块。这样确保了GRAPH程序的周期性执行,其执行顺序为:前永久指令、当前活动步骤中的动作和后永久指令。即使没有活动步骤,永久指令也会在每个周期被执行。
顺控程序的元素主要包括:
- 步:每个步骤代表一个独立的操作单元,有明确的任务和执行顺序。
- 转换条件:定义步骤间的转移逻辑,可以基于特定的输入或事件触发。
- 并行分支:允许同时激活多个步骤,所有分支执行完毕后才进行下一步。
- 选择分支:类似于OR逻辑,根据最先满足的转换条件执行相应分支。
- 关闭分支:结束并行分支的执行。
- 跳转到步:允许程序直接跳转到特定步骤。
- 顺序结尾:表示顺控程序的终止点。
并行分支和选择分支提供了灵活的编程结构,适应多种控制逻辑。例如,并行分支可以处理多个任务同时发生的情况,而选择分支则可以按照优先级或模式决定执行路径。在顺控程序中,可以使用多达249个并行分支,以满足复杂的控制需求。
在手动或自动/半自动模式下,选择分支的执行策略有所不同,手动模式下满足条件的第一个分支会被执行,而在自动或半自动模式下,最左侧的转换条件具有最高的优先级。
总结,GRAPH顺控提供了一种强大的工具,用于构建有序且灵活的自动化解决方案,它通过图形化编程简化了流程控制的设计和调试,使得程序员能够更高效地管理复杂的控制流程。"

如 果 顺 控 程 序 的 所 有 分 支 都 以 顺 序 结 尾 结 束 , 则 可 以 使 用 “INIT_SQ” 参 数 或 “测
试”(Testing) 任务卡的“顺序控制”(Sequence control) 面板中的“初始化”(Initialize) 按钮重新
开始执行顺控程序。
三 步和转换条件
1 有关步的基本知识
简介
可以使用步将复杂的自动化任务分解成各个明确的子任务并通过步中的动作完成。 然
后将各个步加入到顺控程序中,这样每步都可以在程序流中按指定顺序执行。 每步都必须
分配一个唯一的名称和编号。
当激活一个步时将执行该步中的动作。 为此,步必须是初始步,或必须满足该步前面
的转换条件。 也可以通过事件型动作调用一个步。 此外,还可以对步中的互锁条件和监控
条件进行编程。
可以任意选择开始执行顺控程序的步。 为此,可以将任何一个步指定为初始步。 在并
行分支中,可以将多个步指定为初始步。 在顺控程序的循环运行过程中,如果未使用
“INIT_SQ”参数初始化顺控程序,则初始步的执行方式将于其它所有步的相同。 如果重新初
始化该顺控程序,则当“INIT_SQ”处出现信号上升沿时,则激活所有初始步。将取消激活其
它所有步。 在导航视图和顺序视图中,使用方框将初始步框起便于识别。
未编程任何动作的步为空步。 由于在空步中无需执行任何动作,因此顺控程序将直接转到
后面的转换条件。 这样,就可以对两个连续的转换条件进行编程。
并且可以随时更改步的名称和编号。 除此之外,还可以选择使用注释对步进行说明。
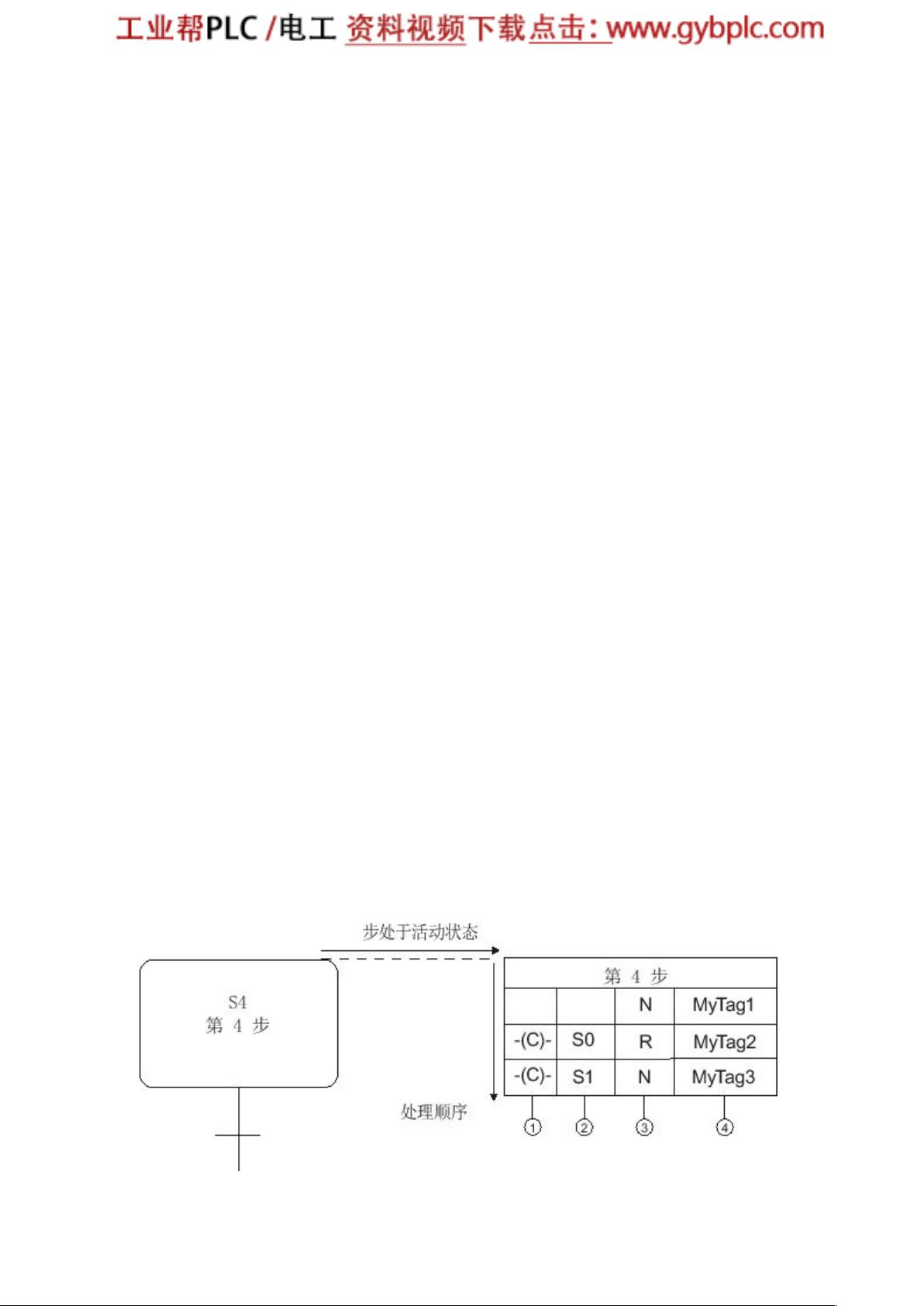
2 步元素
在一个步中可以对以下元素进行编程:
互锁条件
监控条件
动作
1)
互锁条件
可以使用互锁对执行各个动作的条件进行编程。 只有在满足互锁条件时,才执行与互
锁相关联的步中的动作。 如果不满足互锁条件,则将发生错误。 对于这种情况,可以指定
将显示的报警信息。 但该错误不会影响切换到下一步。 此外,还需注意,当步变为不活动
状态后,互锁条件将自动取消。 也可以选择指定操作员必须确认互锁条件报警才能关闭该
报警。
还可以选择不编程互锁中的任何条件,但仍将动作与互锁相关联。 此时,将始终满足
互锁条件。
2)
监控条件
可以使用一个监控条件对可以监控整个步的条件进行编程。 如果满足该条件,则将发
生错误,且该步仍然处于活动状态。 也就是说,在这种情况下顺控程序不切换到下一步,
而是仍在活动步中,直到错误消除。 也可以为该监控条件的报警信息和强制确认。
剩余25页未读,继续阅读
2019-05-06 上传
2021-01-12 上传
2011-12-16 上传
2023-05-30 上传
2023-06-02 上传
2023-05-26 上传
2023-05-23 上传
2023-06-11 上传
2023-03-25 上传

weixin_44223313
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
