四足机器人学入门:位姿表示与坐标变换解析
 已收录资源合集
已收录资源合集
需积分: 0 13 浏览量
更新于2024-08-04
收藏 2.32MB DOCX 举报
"这篇博客是作者自学机器人学过程中的笔记,旨在帮助实验室的后辈学习四足机器人控制和运动控制算法。作者强调了基础知识的重要性,特别是机器人位姿表示和坐标变换,这些都是运动控制算法的基础。文章提到了自由度的概念,解释了如何用坐标和角度来定位物体的位置。在机器人学中,物体的位姿通常在三维空间中表示,每个关节都有对应的坐标。此外,文章还讨论了质心的移动和转动,移动可以通过沿坐标轴的向量来描述,而转动则涉及到旋转矩阵和欧拉角等概念。"
在深入探讨之前,我们需要理解机器人的位姿表示。在机器人学中,位姿通常由位置和姿态两部分组成。位置指的是机器人在空间中的坐标,而姿态则涉及其朝向和旋转状态。在三维空间中,位置可以用三个坐标(x, y, z)来表示,而姿态通常通过旋转矩阵或者欧拉角来描述。
自由度(DoF)是衡量一个系统或对象独立运动能力的指标。对于机器人,每个关节都可以看作是一个自由度,允许它在特定的维度上移动或旋转。例如,一个四足机器人可能有12个自由度,包括腿部的弯曲和旋转等动作。
坐标变换在机器人学中至关重要,因为它允许我们从一个坐标系转换到另一个坐标系,这对于理解机器人运动和规划路径非常关键。这通常涉及到齐次坐标变换矩阵,它结合了平移和旋转的信息。在处理多关节机器人时,这些变换会被连续应用,形成所谓的正向运动学。
在实际的运动控制算法中,我们需要考虑如何将目标位姿转换成各个关节的角度,这称为逆向运动学。同时,为了稳定控制,还需要考虑动力学模型,包括力矩和加速度的影响。
此外,博主提到的思维导图可以帮助读者更直观地理解四足机器人控制的层次结构和各部分之间的关系。从动力学到控制算法,再到实际的硬件接口,每一步都需要扎实的理论基础和实践操作。
这篇博客提供了一个初学者视角的机器人学入门,强调了基础概念的理解和实际应用的重要性。对于想要深入研究四足机器人控制的读者,这篇笔记是一个很好的起点,可以帮助他们构建自己的知识框架,并逐步掌握复杂的机器人控制算法。
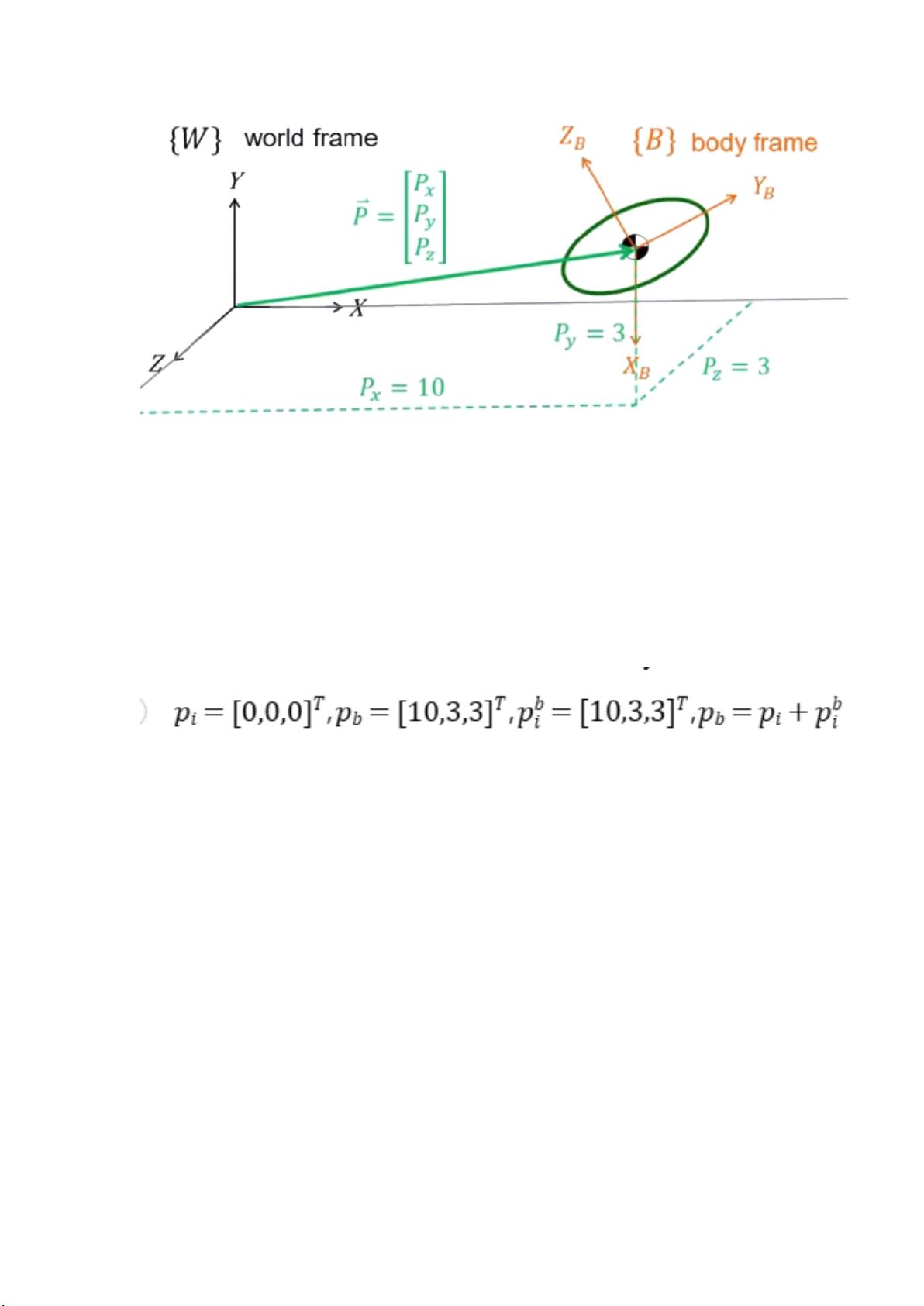
质心的移动和转动
移动
移动其实很简单,例如上图,要将原点移动到 p 点,因为在笛卡尔坐标系上沿着
坐标轴移动是不会再其他方向产生分量的,所以只要分别沿着 x,y,z 轴移动相
对距离就好。
旋转
旋转比起移动来说就稍微复杂一点,首先我们看一下旋转矩阵的样子
剩余10页未读,继续阅读
114 浏览量
2010-04-09 上传
2011-09-17 上传
2017-12-07 上传
2023-12-13 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

吃西瓜不吐象牙
- 粉丝: 7
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
