平衡小车速度控制:串级PID策略
需积分: 50 188 浏览量
更新于2024-09-09
2
收藏 222KB PDF 举报
平衡小车速度控制原理是一种复杂的技术,它涉及到多个层次的控制策略以确保车辆的稳定性和速度准确性。不同于传统的电机速度闭环控制,平衡小车的速度控制需要同时处理直立控制和速度控制的需求,这就增加了设计的复杂性。
首先,我们讨论了常规的速度负反馈算法。当设定一个目标速度时,小车通过前倾来获得加速度,这会导致车轮反向运动,进而减慢速度。然而,由于负反馈机制,速度下降会增加小车倾斜的角度,形成正反馈,最终可能导致小车失去平衡。因此,这种简单的速度控制方法在直立控制的影响下是不适用的。
为了解决这个问题,采用了一种串级PID控制策略。在这种控制架构中,速度控制被置于直立控制之前,它的目的是调整直立控制的目标值,而不是直接控制电机速度。这个策略基于小车速度与倾角之间的密切关系:增加倾角有助于提升速度,反之则减小速度以保持平衡。通过这种方式,速度控制和直立控制形成了一个串联系统,其中速度控制器的输出驱动直立控制器,而直立控制器的输出又决定了小车的实际运动。
直立控制部分通常采用PD控制器,考虑到编码器可能存在的噪声,为了减少噪声放大和静差,速度控制器则选择使用PI控制。PID(比例-积分-微分)控制是工业界广泛使用的控制算法,它结合了比例、积分和微分三个参数,能够更精确地追踪目标值并消除误差积累。
控制算法的具体表达式为:
1. 直立控制算法(式1):
θd = kdθ + kp(e(k) - θ)
2. 速度控制算法(式2):
θ̇d = ke(k) + ki∑e(k) + kp(θ - θd)
3. 合并后的简化版控制(式3):
θ̇d = kp(θd - θ) - ki∑e(k)
通过这种方式,系统能够在保证小车直立稳定的前提下,有效地调整速度,实现精确的速度控制。这种串级PID控制策略的关键在于合理设置PID参数,以达到最佳的控制性能和稳定性。在实际应用中,这些参数可能需要通过实验或仿真进行优化,以适应不同的小车特性和环境条件。
1
平衡小车速度控制原理与串级 PID
在之前的电机速度闭环控制里面,我们有介绍了相关的算法。但是平衡小车
的速度控制与之相比,要复杂很多,因为小车的两个电机需要进行直立控制的同
时去进行速度控制。
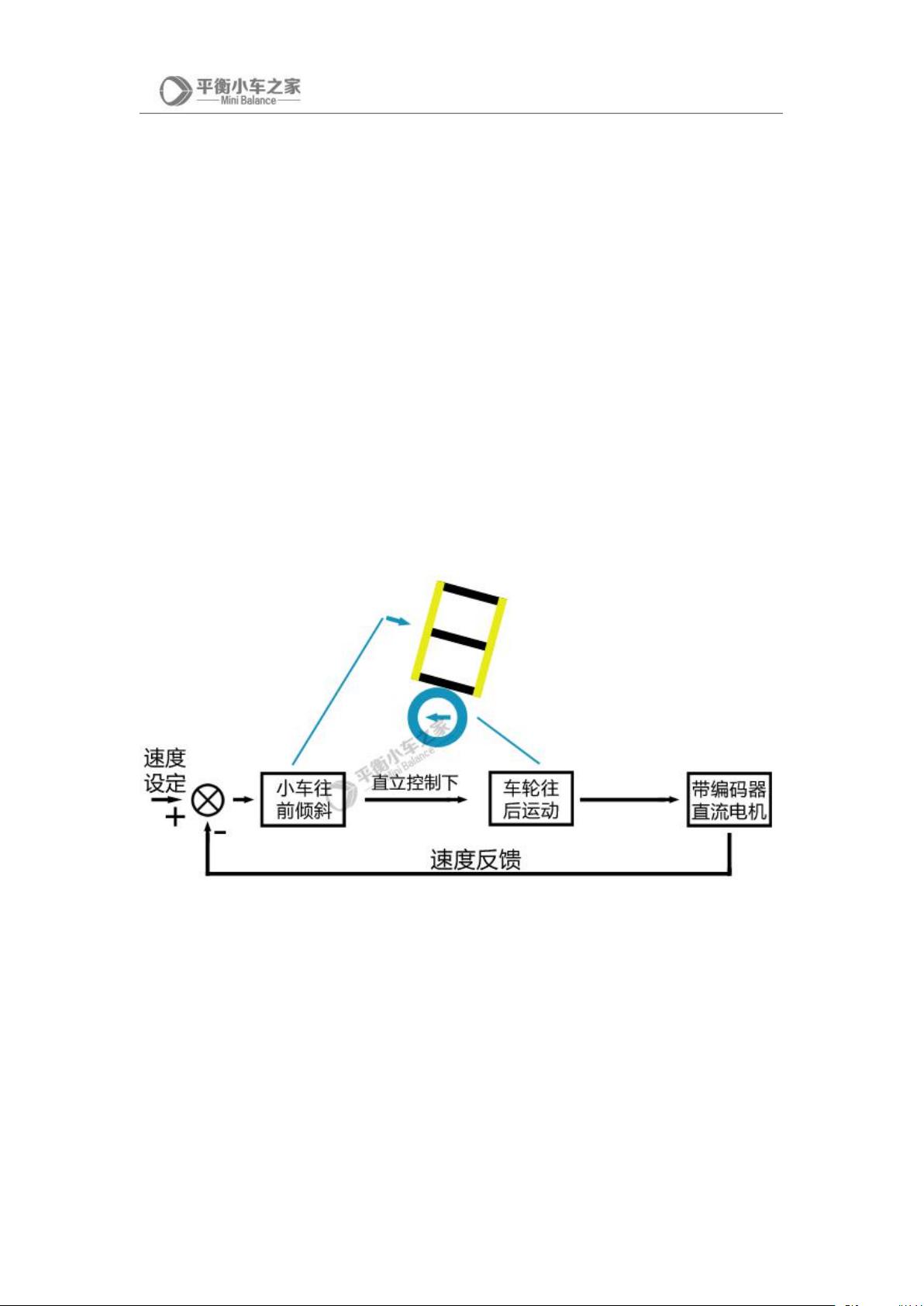
我们先使用常规的速度负反馈算法试一下,看在平衡小车上面是否奏效。首
先我们给定一个目标速度值,由于小车在直立控制的作用下,此时小车要向前倾
斜以获取加速度,车轮需要往后运动,这样小车速度就会下降。因为是负反馈,
速度下降之后,速度控制的偏差增大,小车往前倾斜的角度增大,如此反复,小
车便会倒下。常规的速度负反馈在直立控制的影响下起到了正反馈效果。如图1
所示。
图1 直立控制下的速度负反馈控制
根据以上的分析,在直立控制里面加入速度负反馈无法达到速度闭环的目
的,而且还会破坏直立控制系统。下面我们换一种思路。
为保证直立控制的优先级,我们把速度控制放在直立控制的前面,也就是速
度控制调节的结果仅仅是改变直立控制的目标值。因为根据经验可知,小车的运
行速度和小车的倾角是相关的。比如要提高小车向前行驶的速度,就需要增加小
车向前倾斜的角度,倾斜角度加大之后,车轮在直立控制的作用下需要向前运动
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
1478 浏览量
255 浏览量
147 浏览量
170 浏览量
857 浏览量
178 浏览量
2021-09-27 上传
1854 浏览量

weixin_41796426
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 软件能力成熟度模型 软件工程
- 连续刚构桥外文文献(Stability Analysis of Long-Span Continuous Rigid Frame Bridge with Thin-Wall Pier)
- 网络管理不可或缺的十本手册
- JAVA设计模式.pdf
- ucosii实时操作系统word版本
- 英语词汇逻辑记忆法WORD
- 《开源》旗舰电子杂志2008年第7期
- 图书馆管理系统UML建模作业
- struts2权威指南
- jdk+tomcat+jfreechart+sql_server2000安装心得
- 40个单片机汇编和C程序
- 嵌入式linux系统开发技术详解
- quartus使用手册
- struts2教程英文版
- 虚拟串口软件驱动设计文档
- C++内存分配的对齐规则
