KRC4电伺服焊枪配置步骤详解
需积分: 50 6 浏览量
更新于2024-07-16
收藏 4.3MB PDF 举报
"该资源是一份关于KRC4电伺服焊枪配置的PDF文档,主要指导用户如何在KUKA工业机器人系统中设置和配置焊枪。内容涉及到使用WorkVisual软件,上传配置数据,加载机器人项目,以及进行网络连接、焊枪与机器人之间的连接设置、参数配置等步骤。此外,文档还提到了电机和伺服文件的加载,以及安全配置的更新。"
在配置KRC4电伺服焊枪的过程中,首先要确保使用的是与当前机器人柜相匹配的WorkVisual软件版本。这可以通过安装机器人柜内光盘提供的软件来实现。接下来,要上传机器人原始配置数据,并加载机器人内部的项目,以确保软件与机器人系统的同步。
在硬件连接方面,需要将电脑通过网线与机器人相连,确保网络地址一致,以便于通信。在WorkVisual软件中,查找并打开机器人项目,选择绿色的项目文件。然后,加载由甲方提供的焊枪.AFC文件,以及对应的伺服枪.AFC文件,确保焊枪样本成功加载。
在软件配置阶段,进入KUKA设备视图,打开编辑器,配置焊枪与机器人的关系。通过选择特定符号,建立焊枪与机器人的连接。接着,进入机器参数配置,对关节1进行设置,输入焊枪参数文件中的传动比和其他关键参数,如正向和反向开口距离。同时,根据电机名牌输入电机的额定转速等相关参数。
在电机和伺服配置环节,需要加载电机和伺服文件。如果加载过程中出现问题,可能会导致错误提示,这时需要检查文件是否正确导入。完成配置后,机器人会提示重新配置,并要求在安全配置中进行更新。
对于多枪配置的情况,基本步骤类似,但需注意焊枪的方向,如有需要,可在示教器中调整传动比数值。在整个配置过程中,所有的数值都需要精确输入,以确保焊枪能准确、安全地工作。
这份PDF文档详尽地介绍了KRC4电伺服焊枪在KUKA工业机器人系统中的配置步骤,涵盖了从软件安装、硬件连接到参数设置的全过程,是进行相关工作的宝贵参考资料。
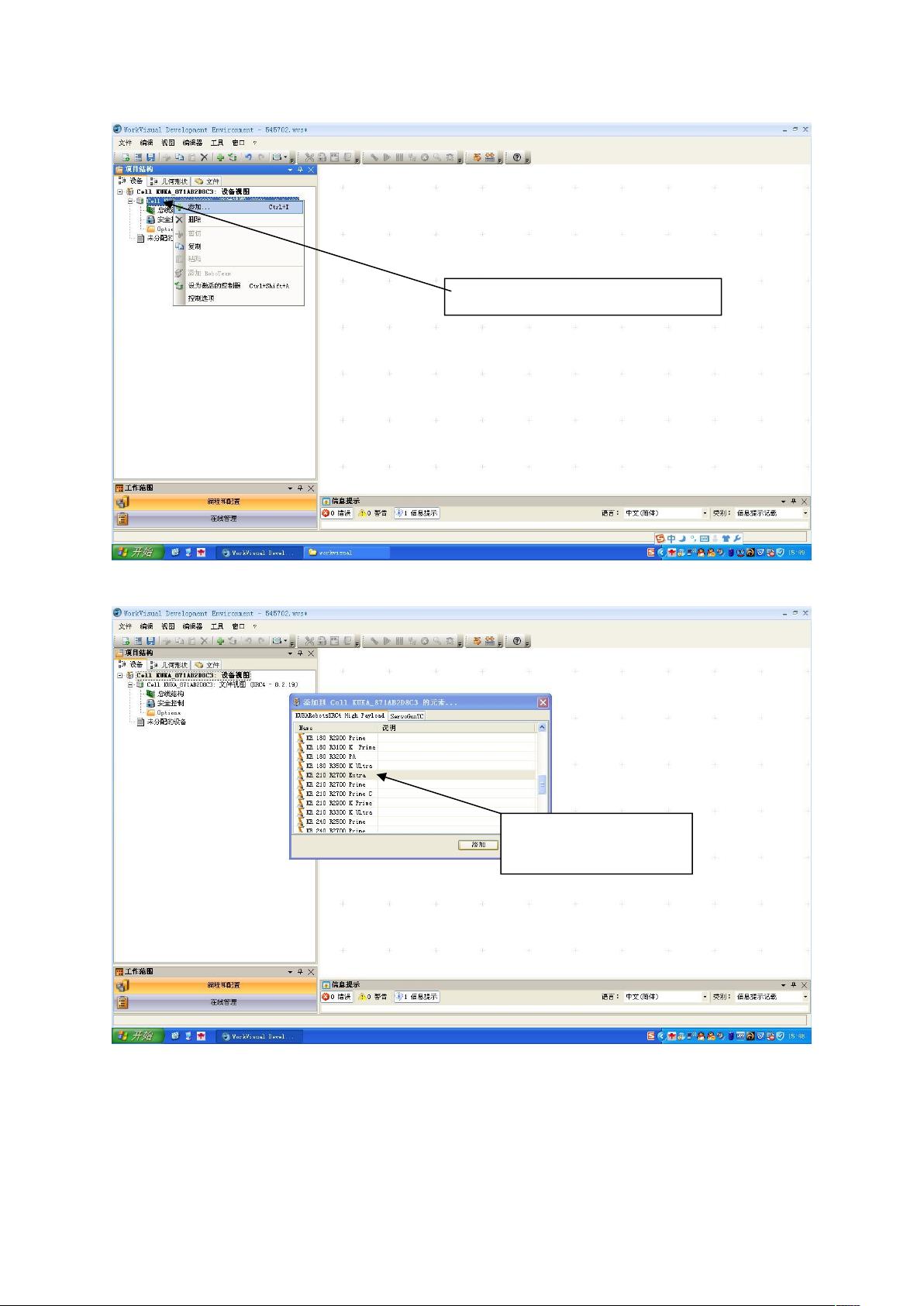
右击,添加焊枪和机器人样本
添加对应机器人和焊枪
样本
剩余24页未读,继续阅读
230 浏览量
点击了解资源详情
480 浏览量
230 浏览量
480 浏览量
3123 浏览量
134 浏览量
127 浏览量

oLiangYin
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- android-showcase
- 科巴
- nacos-2.2.4
- Resume-and-Cover-Letter:我用 HTML 和求职信生成器编写的简历版本。 在此处查看简历导出
- Form-2
- 新人培训课程体系
- PicBed:用于在md中上传图片
- homu.homu-api
- 客户投诉处理管理规定
- 盖茨比·卡斯珀
- rt-thread-code-stm32f407-st-discovery.rar,stm32f407-st-discovery
- gadoory
- 电子功用-开关型直流-直流电源转换器
- Circall:Circall是一种从配对末端RNA测序数据中发现环状RNA的新颖方法
- SETView:实现 NewsAPI 以与技术新闻交互并显示技术新闻的 Web 应用程序
- java调用dll详解.rar
