MOTOMAN-HP3机器人运动学建模及其关节范围转换研究
需积分: 9 37 浏览量
更新于2024-08-12
收藏 219KB PDF 举报
本文主要探讨了MOTOMAN-HP3型机器人的运动学建模,该研究是在2009年由北京工商大学机械工程学院的李颖、辛洪兵、赵东洋和林立四位作者完成。MOTOMAN-HP3是一种工业机器人,其运动学模型的构建对于机器人技术至关重要,因为它涉及到机器人运动的分析、离线编程和轨迹规划等多个核心应用领域。
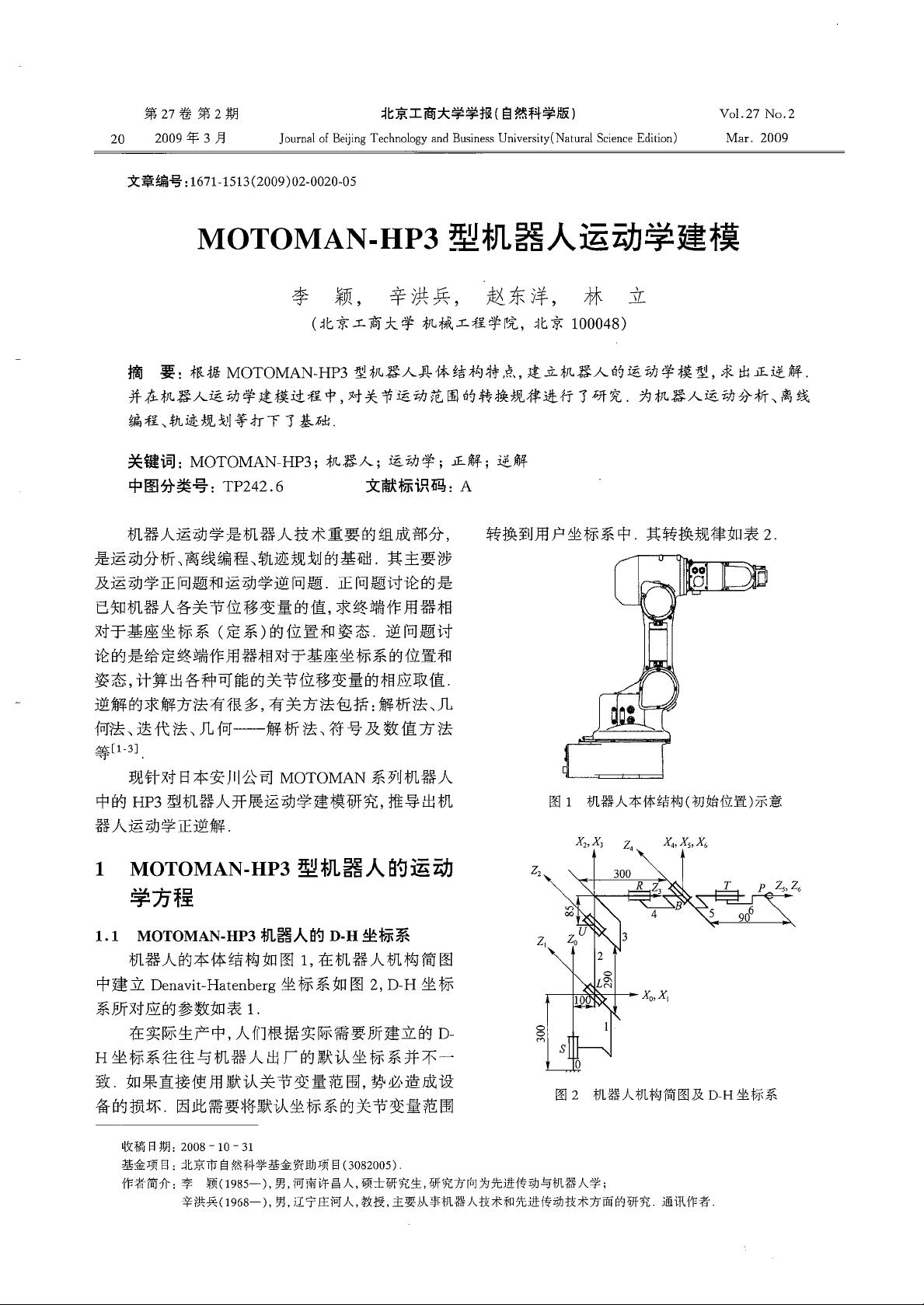
在建模过程中,作者首先依据MOTOMAN-HP3的特定结构特点,利用Denavit-Hartenberg(D-H)坐标系对其进行描述。D-H坐标系是一种常用的机器人运动学建模工具,它通过关节变量和变换矩阵来描述机器人各关节之间的相对运动。图1展示了机器人的初始本体结构,而图2则详细展示了机器人机构简图以及与其相关的D-H坐标系及其参数。
在实际应用中,由于工业需求的不同,D-H坐标系可能与出厂默认坐标系存在差异。为了保护设备安全,必须对关节变量的默认范围进行调整,以适应实际操作条件。文章指出,运动学正问题涉及已知关节角度求末端执行器的位姿,而运动学逆问题则是根据终端位置和姿态反向求解关节角度。解决这些逆解的方法多种多样,包括解析法、几何法、迭代法、几何解析法、符号法和数值方法等。
作者通过对MOTOMAN-HP3型机器人的运动学正逆解的推导,为机器人运动控制提供了理论基础。这些研究成果不仅有助于深入理解机器人的运动特性,而且在实际生产环境中,能够优化编程策略,提高工作效率和精度。
本文通过对MOTOMAN-HP3机器人运动学模型的构建,以及对关节运动范围转换规律的研究,为机器人运动控制领域的专业人士提供了一个实用且理论扎实的工具,对于推动机器人技术的发展具有重要意义。
第
27
卷第
2
期
20
2009
年
3
月
北京工商大学学报(自然科学版)
Vo
1.
27
No.2
Mar.
2009
Journal
of
Beijing Technology and Business University(Natural Science Edition)
文章编号
:1671-1513(2009)02-0020
同时
MOTOMAN-HP3
型机器人运动学建模
李颖,辛洪兵,赵东洋,林立
(北京工商大学机械工程学院,北京
100048)
摘
要:根据
MOTOMAN-HP3
型机器人具体结构特点,建立机器人的运动学模型,求出正逆解.
并在机器人运动学建模过程中,对关节运动范围的转换规律进行丁研究.为机器人运动分析、离线
编程、轨迹规划等打下丁基础.
关键词:
MOTOMAN-HP3;
机器人;运动学;正解;注解
中图分类号:
TP242.6
文献标识码
:A
机器人运动学是机器人技术重要的组成部分,
转换到用户坐标系中.其转换规律如表
2.
是运动分析、离线编程、轨迹规划的基础.其主要涉
及运动学正问题和运动学逆问题.正问题讨论的是
己知机器人各关节位移变量的值,求终端作用器相
对于基座坐标系(定系)的位置和姿态逆问题讨
论的是给定终端作用器相对于基座坐标系的位置和
姿态,计算出各种可能的关节位移变量的相应取值
逆解的求解方法有很多,有关方法包括:解析法、几
何法、迭代法、几何一一一解析法、符号及数值方法
等
[1-3]
现针对日本安川公司
MOTOMAN
系列机器人
中的
HP3
型机器人开展运动学建模研究,推导出机
图
1
机器人本体结构(初始位置)示意
器人运动学正逆解.
几,几
Z
,
,
X"
!',
X
6
1.1
MOTOMAN-HP3
机器人的
D-H
坐标系
机器人的本体结构如图
1
,在机器人机构简图
中建立
Dena
飞
Tit-Hatenberg
坐标系如图
2
,
D-H
坐标
系所对应的参数如表1.
在实际生产中,人们根据实际需要所建立的
D
H
坐标系往往与机器人出厂的默认坐标系并不一
致.如果直接使用默认关节变量范围,势必造成设
备的损坏.因此需要将默认坐标系的关节变量范围
OOMU
1
MOTOMAN-HP3
型机器人的运动
z
学方程
图
2
机器人机构简图及
D-H
坐标系
收稿日期:
2008
-
10
-
31
基金项目.北京市自然科学基金资助项目
(3082005)
作者简介.李
颖
(1985-)
,男,河南许昌人,硕士研究生,研究方向为先进传动与机器人学;
辛洪兵(1
968
一),男,辽宁庄河人,教授,主要从事机器人技术和先进传动技术方面的研究通讯作者
下载后可阅读完整内容,剩余4页未读,立即下载
2019-11-13 上传
2021-08-14 上传
2021-08-14 上传
2016-06-29 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38656064
- 粉丝: 9
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
