2020 RoboMaster裁判系统串口协议V1.11:新增飞镖指令与接口详解
需积分: 0 142 浏览量
更新于2024-07-01
收藏 596KB PDF 举报
裁判系统学生串口协议附录 V1.11 是由RoboMaster组委会在2020年5月15日发布的,针对2020年的比赛规则和设备通信需求进行了更新。该协议主要关注于飞镖机器人客户端的指令数据交互以及网络接口的具体实现。
首先,协议增加了飞镖机器人客户端的指令数据,这意味着开发者可以利用这些新命令来控制和获取机器人的状态信息。这包括比赛状态、比赛结果、机器人血量、发射状态、AI挑战赛区域状态、场地事件、补给站动作、警告信息、发射口倒计时、机器人状态、功率热量、位置、增益、空中机器人能量状态、伤害状态以及实时射击数据等。这些数据的频率各不相同,从1Hz到50Hz,体现了对实时性和准确性不同的要求。
串口配置方面,协议规定了通信方式采用串口,波特率为115200bps,数据位为8位,停止位为1位,且没有启用硬件流控和校验位。这样的配置适合于稳定且效率较高的通信环境,但可能需要在实际应用中根据具体硬件条件进行调整。
协议的核心是通信协议格式,它包括一个5字节的帧头(SOF、数据长度、序列号和CRC8校验),接着是2字节的命令标识(cmd_id),然后是可变长度的数据段,最后是2字节的帧尾(CRC16校验,用于确认整个数据包的完整性)。帧头中的SOF(开始-of-frame)字段固定为0xA5,用于标记数据帧的开始。每个命令都有特定的cmd_id,如比赛状态数据、比赛结果、机器人血量等,每个cmd_id对应的数据长度和功能描述详细列出了。
总体来说,裁判系统学生串口协议V1.11为开发者提供了清晰的通信指南,使得飞镖机器人能够与裁判系统及其他设备高效、准确地交换信息,确保比赛的正常运行和公正性。对于参与或开发相关比赛系统的人员而言,理解和掌握这一协议至关重要。
6
© 2020
大疆创新
版权所有
字节偏移量
大小
说明
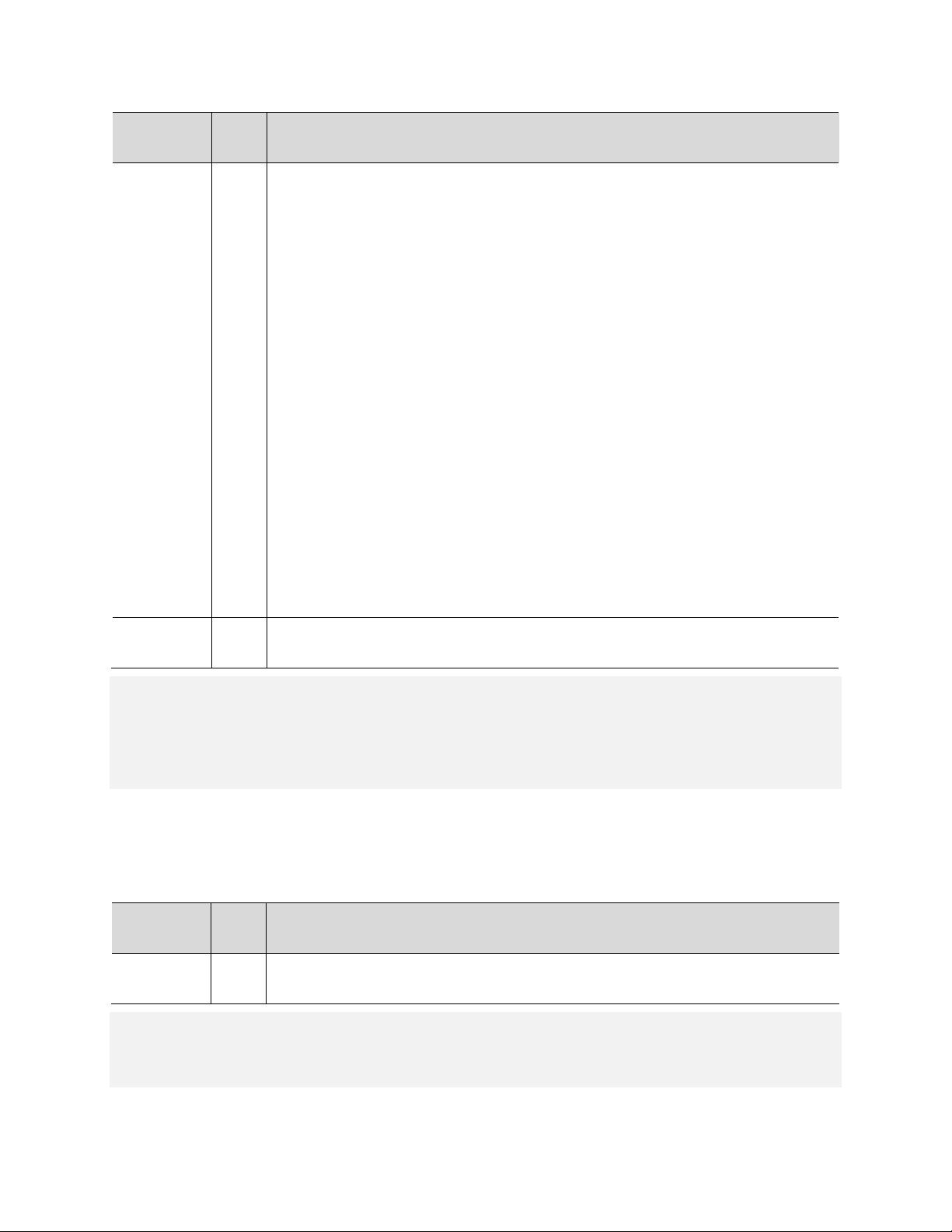
0
1
0-3 bit
:比赛类型
1
:
RoboMaster
机甲大师赛;
2
:
RoboMaster
机甲大师单项赛;
3
:
ICRA RoboMaster
人工智能挑战赛
4-7 bit
:当前比赛阶段
0
:未开始比赛;
1
:准备阶段;
2
:自检阶段;
3
:
5s
倒计时;
4
:对战中;
5
:比赛结算中
1
2
当前阶段剩余时间,单位
s
typedef __packed struct
{
uint8_t game_type : 4;
uint8_t game_progress : 4;
uint16_t stage_remain_time;
} ext_game_status_t;
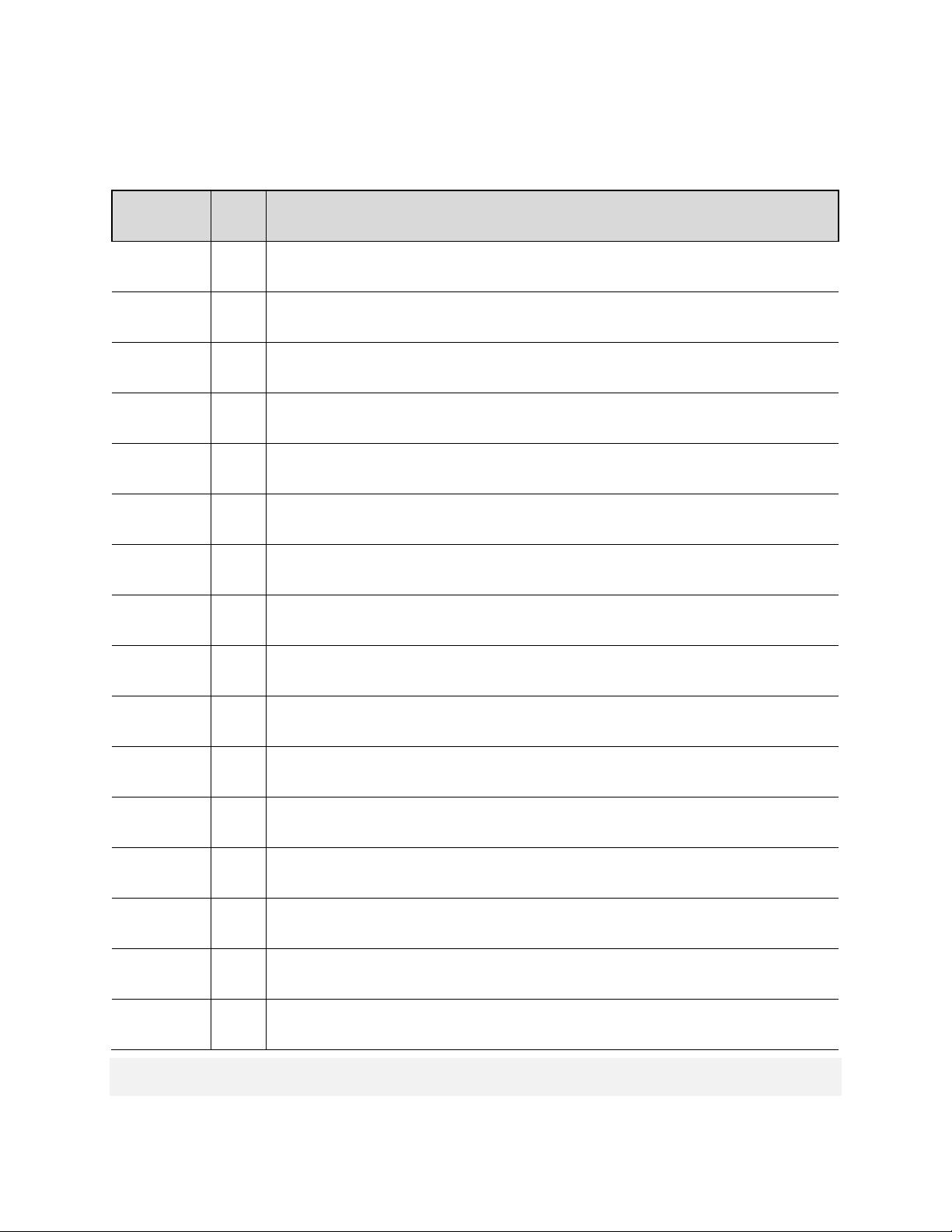
2. 比赛结果数据:0x0002。发送频率:比赛结束后发送,发送范围:所有机器人。
字节偏移量
大小
说明
0
1
0
平局
1
红方胜利
2
蓝方胜利
typedef __packed struct
{
uint8_t winner;
} ext_game_result_t;
剩余31页未读,继续阅读
2022-08-03 上传
2022-08-08 上传
2022-08-03 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传

坑货两只
- 粉丝: 1018
- 资源: 290
 我的内容管理
展开
我的内容管理
展开







最新资源
- easymc:easymc.io的API,该站点允许您使用令牌登录Minecraft帐户
- thread-stream:一种将数据发送到Node.js辅助线程的流传输方式
- lab2Zad5
- Krumo-开源
- Megasena-crx插件
- chengfakoujue,c语言采蘑菇源码,c语言项目
- 独立按键_单片机C语言实例(纯C语言源代码).zip
- s9:基于 Svelte 的前端业务框架
- smartsoft:适用于任何角度,嵌套,离子项目的多种工具
- cofcod
- Notes_About_CL:对比学习笔记
- 安卓一个木函v7.9.8.8 多功能工具箱.txt打包整理.zip
- SCATTERSHAPE:将 SCATTER 中的补丁变成形状。-matlab开发
- burger_war_autotest:burger_war_autotest
- MatrixLiteLib,c语言源码中文版,c语言项目
- todo-code-along
