ROS驱动的全自主四轴飞行器开发
需积分: 9 160 浏览量
更新于2024-07-18
收藏 8.43MB PDF 举报
"该资源是一篇关于开发ROS(Robot Operating System)驱动的全自主四轴飞行器的硕士论文,由Ivan Monzon在2013年于瑞典吕勒奥理工大学完成,隶属于计算机科学、电气与空间工程系的控制工程小组。论文主要探讨了两个核心主题:四轴飞行器的设计与开发,以及基于ROS的全自主控制软件环境的设计与开发。"
ROS是一种专为机器人平台设计的新型操作系统,它提供了一套全面的工具和服务,包括硬件抽象、低级设备控制、消息传递中间件、常用功能库以及用于构建复杂机器人软件系统的框架。在这篇论文中,作者深入研究了如何在不同的机器人平台上管理操作系统,探讨了ROS环境中的各种编程方式,评估了构建方案,并且开发了与ROS的接口。
论文的工作涵盖了多个软件开发方面,包括但不限于:
1. **硬件平台集成**:四轴飞行器的设计和构建,这涉及到飞行器的机械结构、电子系统和传感器的选择与集成,以确保飞行器能够稳定飞行并获取必要的环境数据。
2. **ROS环境编程**:学习如何在ROS环境下编写代码,这可能涉及节点创建、消息传递、服务和参数服务器等核心概念,以及如何利用ROS提供的各种库和工具进行开发。
3. **系统架构设计**:设计一个完整的软件控制系统,它能够处理从传感器获取的数据,进行飞行控制决策,如姿态控制、路径规划和避障等。
4. **接口开发**:创建ROS节点来与飞行器硬件通信,这通常涉及到解析传感器数据,发送控制指令,以及可能的地面站通信。
5. **性能评估与测试**:通过实际飞行测试验证所开发系统的性能,这可能包括室内和室外的飞行试验,以及不同条件下的自主飞行任务。
6. **安全性与可靠性**:在设计过程中考虑系统的安全性和可靠性,确保四轴飞行器在自主飞行时能够应对各种突发情况,避免意外发生。
7. **文献回顾与理论基础**:论文可能包含了对现有无人机技术和ROS相关研究的回顾,为设计和实现提供了理论基础。
通过这篇论文,读者可以了解到ROS如何被应用于实现四轴飞行器的全自主控制,以及在实际开发过程中可能遇到的问题和解决方案。这对于想要涉足无人机自主控制或ROS应用的工程师和研究人员来说,是一份宝贵的学习资料。

4 Introduction
[8]. Currently, they are developing the ACTUV (autonomous military vessel) [9], the
BigDog and the LS3 (4-legged autonomous robots) [10], the EATR (an autonomous
vehicle which is able to run on any biomass) and the future Vulture (a UAV able to be
in the air for five years).
Even with a much smaller funding, civil investigations have been no less. The European
project AWARE [11] has designed autonomous unmanned aerial robots, distributed and
able to cooperate with each other for intervention in disasters and fires. Researchers at
IFM-GEOMAR have created the largest fleet of underwater exploration robots in Europe
[12]. The Google driverless car is capable of running autonomously both city and road
[13], while brands such as Volvo, BMW and Audi also have similar projects underway.
A very interesting topic that significantly added intelligence in the field of autonomous
robots has been the SLAM (Simultaneous Localization and Mapping) concept. SLAM
addresses the problem of robot to traverse a previously unknown terrain. The robot
makes a relative observation on the surrounding environment to reconstruct a map of
that environment so it can create a motion path to follow. If that map is available, the
robot uses the SLAM information to position itself properly in it. Robots of all kinds (as
you can see in Figure 1.4) make use of this technique for orientation.
Figure 1.4: Robots using SLAM
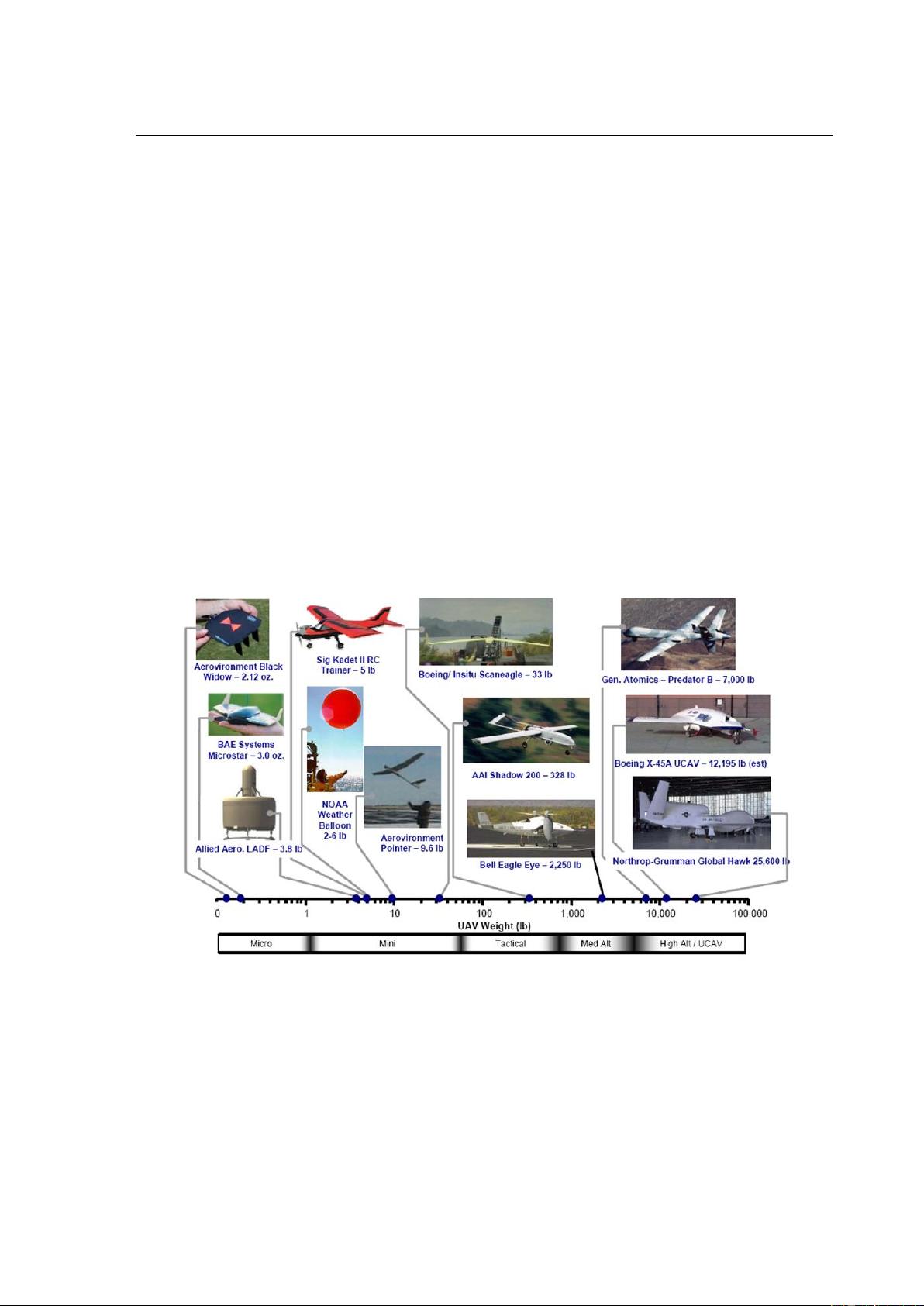
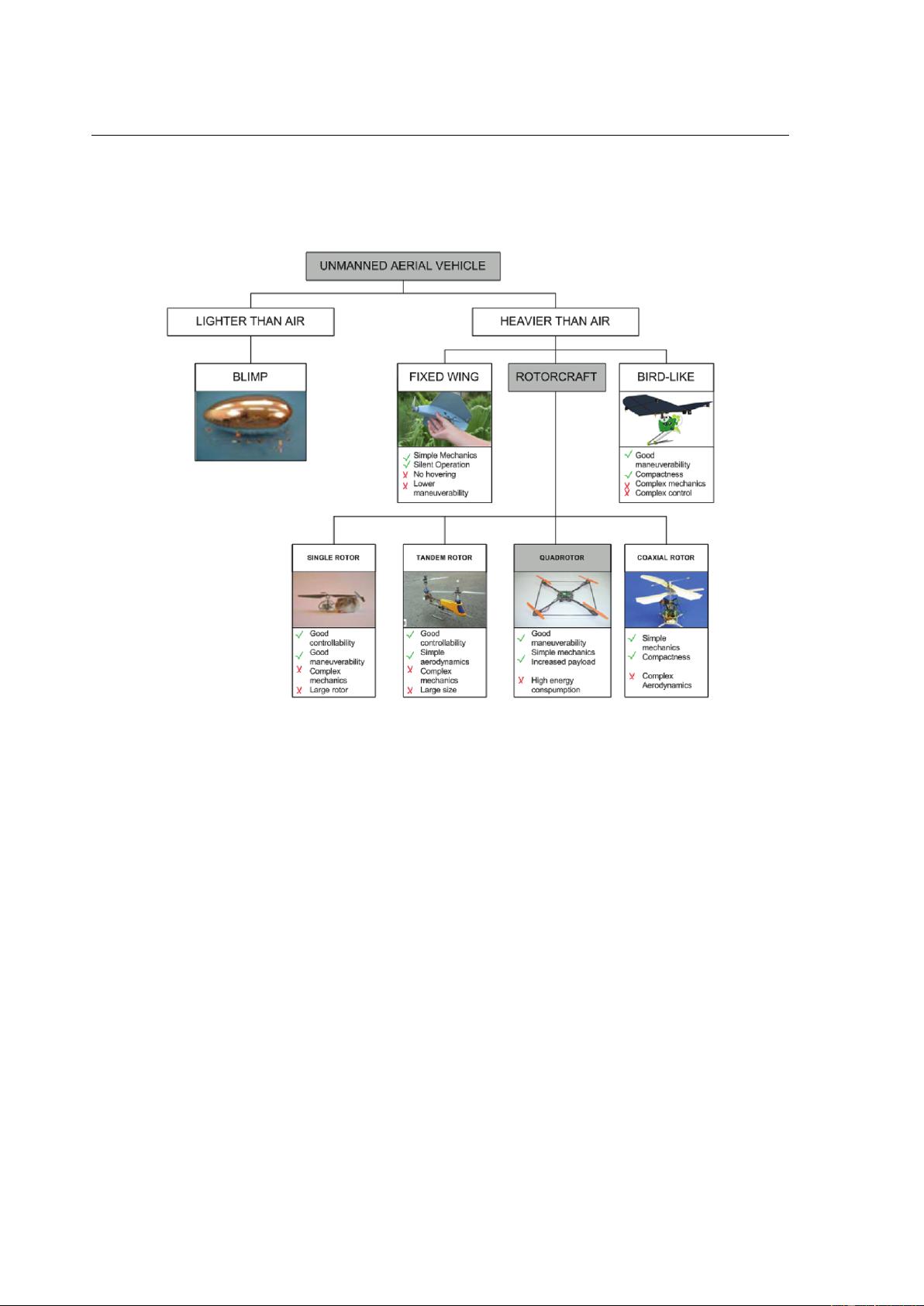
1.2 UAVs (Unmanned Aerial Vehicle)
Among all this astonishments range of robotic possibilities, the research that concerns
us here is specifically focused on the problem of autonomous flying robots.
UAVs, or unmanned aerial vehicles, have been in our world since the First World War,
but at that time they were very focused on military environments. Then, UAVs have
been used as a safer way to fly (at least for the side that controlled it), since no pilot was
required. Moreover, for this reason, you could make smaller aircraft, more aerodynamic,
more agile, and with a less fuel consumption.
剩余73页未读,继续阅读
2017-09-23 上传
2014-08-03 上传
2021-03-31 上传
2017-06-30 上传
2021-05-17 上传
2023-05-05 上传
2023-06-11 上传
2023-06-11 上传

0阿齐兹0
- 粉丝: 32
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
