Angular1.x复杂指令深度解析:实例演示与使用技巧
23 浏览量
更新于2024-09-01
收藏 84KB PDF 举报
本文将深入探讨Angular1.x中的复杂指令,一种高级功能,它允许开发者在模板中创建自定义的行为和UI组件。复杂指令在Angular1.x版本中扮演着关键角色,特别是在处理数据绑定和动态生成HTML结构时,它们提供了更大的灵活性。
首先,我们来理解"指令的使用"这一核心概念。指令是Angular的基本构建块,用于扩展HTML元素的功能。在上面的示例中,`.directive('unorderedList',function(){...})`是一个自定义指令的定义,它接收三个参数:link函数、限制类型(EACM,表示元素、属性、类名或注释)、以及可能的控制器和编译函数。link函数是指令的主要逻辑,它会绑定到DOM元素和作用域上,并执行特定的操作。
在`link`函数中,`data`变量是通过`listSource`或`attrs['listSource']`属性从作用域中获取的,而`listProperty`则用于设置每个列表项的显示值,如`price|currency`。如果数据是一个数组,会生成一个无序列表(`<ul>`)并遍历数据,使用`$eval`方法解析`listProperty`表达式,将其应用到每个数组元素上。
指令的使用方式有两种:作为元素(E)或属性(A)。作为元素使用时,需要提供`listSource`和`listProperty`属性,例如`<unordered-list list-source="products" list-property="price|currency">`。而作为属性使用时,可以在标签内直接定义指令,如`<div unordered-list="products" list-property="price|currency"></div>`。
接下来,我们看看指令的其他组成部分:
1. **compile**:虽然没有直接给出,但这是一个可选的函数,用于在插入到DOM之前对元素进行预处理,例如HTML转换或CSS插入。
2. **controller**:未在提供的代码中展示,但可以用来定义一个独立于指令的控制器,为指令的行为提供额外的状态和逻辑。
指令的作用域是另一个重要概念。Angular指令默认继承父作用域,但在某些情况下,如上述例子中,由于使用了`scope.$eval`,指令的作用域可能会扩大到包含外部数据。了解何时选择使用孤立作用域(`scope: {}`)或嵌套作用域(`scope: true`)对于控制数据的隔离和避免潜在的副作用至关重要。
总结来说,Angular1.x复杂指令是通过自定义函数和配置来增强HTML元素的功能,它涉及到数据绑定、模板操作、作用域管理和可扩展性。理解并熟练运用这些技术,可以帮助开发者更好地构建可复用和高效的组件,提升Angular应用的灵活性和性能。
Angular1.x复杂指令实例详解复杂指令实例详解
主要介绍了Angular1.x复杂指令,结合实例形式分析了指令的使用、模板指令、指令的作用域等概念与具体使用
技巧,需要的朋友可以参考下
本文实例讲述了Angular1.x复杂指令。分享给大家供大家参考,具体如下:
.directive('unorderedList', function () {
return {
link: function (scope, element, attrs) {
var data = scope[attrs['unorderedList'] || attrs['listSource'] ];
var propertyName = attrs['listProperty'] || "price || currency";
if(angular.isArray(data)){
var listElem = angular.element("<ul>");
if(element[0].nodeName == "#comment"){
element.parent().append(listElem);
}else{
element.append(listElem);
}
for(var i=0, len=data.length; i<len; i++){
var itemElem = angular.element('<li>').text(scope.$eval(propertyName, data[i]));
listElem.append(itemElem);
}
}
},
restrict:'EACM'
};
});
如何使用指令如何使用指令
当作元素使用(E)
<unordered-list list-source="products" list-property="price | currency" />
当unordered-list当作元素使用,需要添加另外的属性代替unordered-list属性的作用。
var data = scope[attrs['unorderedList'] || attrs['listSource'] ];
当作属性使用(A)
<div unordered-list="products" list-property="price | currency"></div>
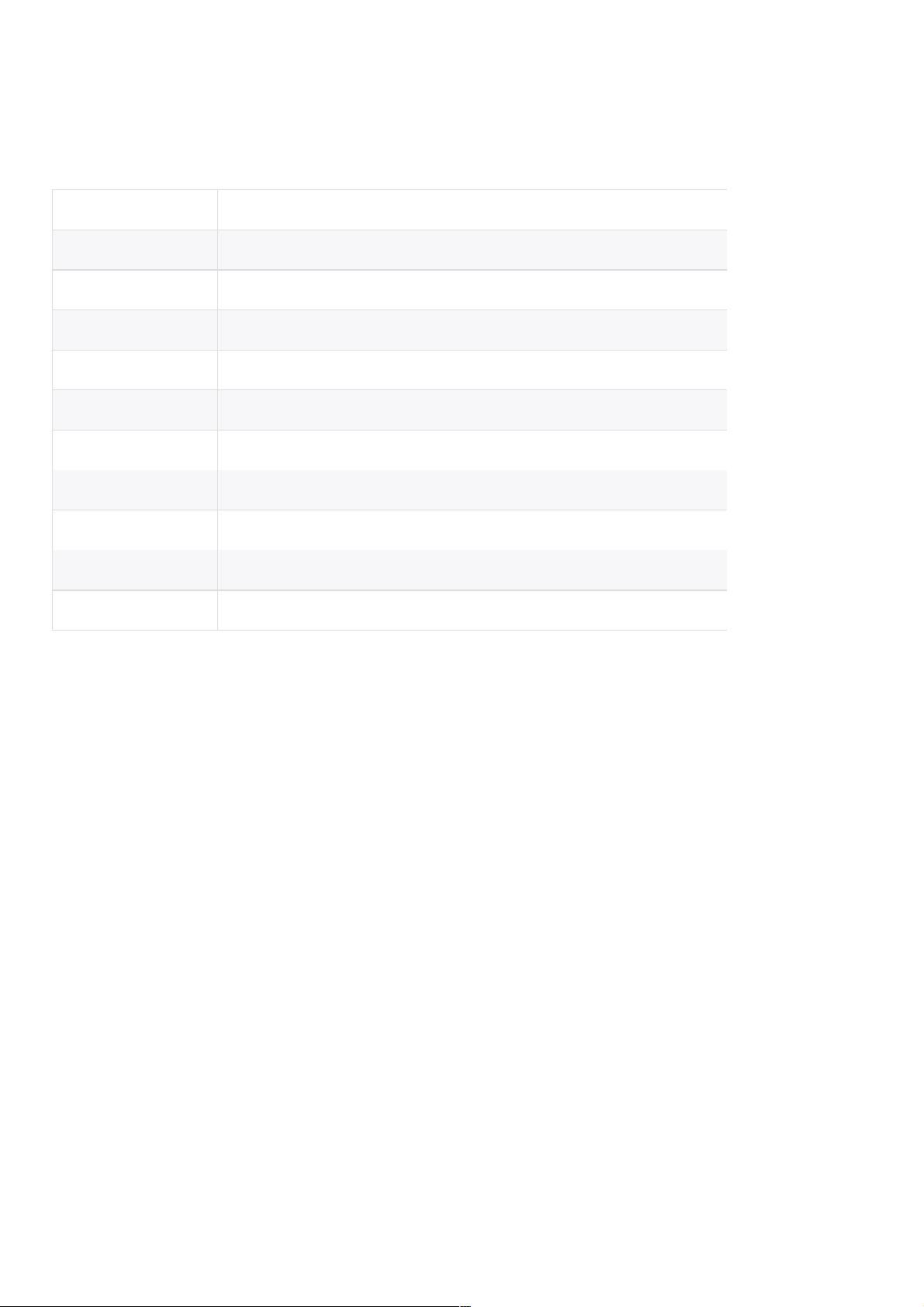
名称
描述
compile
指定一个编译函数
controller
为指令创建一个控制器函数
link
为指令指定链接函数
replace
指定模板内容是否替换指令所应用到的元素
require
声明对某个控制器的依赖
restrict
指定指令如何使用ACEM
scope
为指令创建一个新的作用域或者一个隔离的作用域
template
指定一个将被插入到HTML文档的模板
templateUrl
指定一个将被插入到HTML文档的外部模板
transclude
指定指令是否被用于包含任意内容
下载后可阅读完整内容,剩余4页未读,立即下载
2020-08-31 上传
2019-08-12 上传
点击了解资源详情
点击了解资源详情
2023-05-25 上传
2023-05-25 上传
2023-05-25 上传
2023-05-25 上传
2023-05-25 上传

weixin_38632006
- 粉丝: 3
- 资源: 939
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
