STM32Cubemx下Slamugv小车电机PWM调速教程与GPIO配置
105 浏览量
更新于2024-08-28
收藏 222KB PDF 举报
本篇文档主要介绍了如何在SLAMUGV小车中使用Pulse Width Modulation (PWM)技术来精确控制电机的速度。PWM是一种广泛应用于电机驱动控制中的调速技术,通过调整脉冲信号的占空比来改变电机转速。在这个教程中,着重讲解了以下几个关键知识点:
1. **PWM概述**:
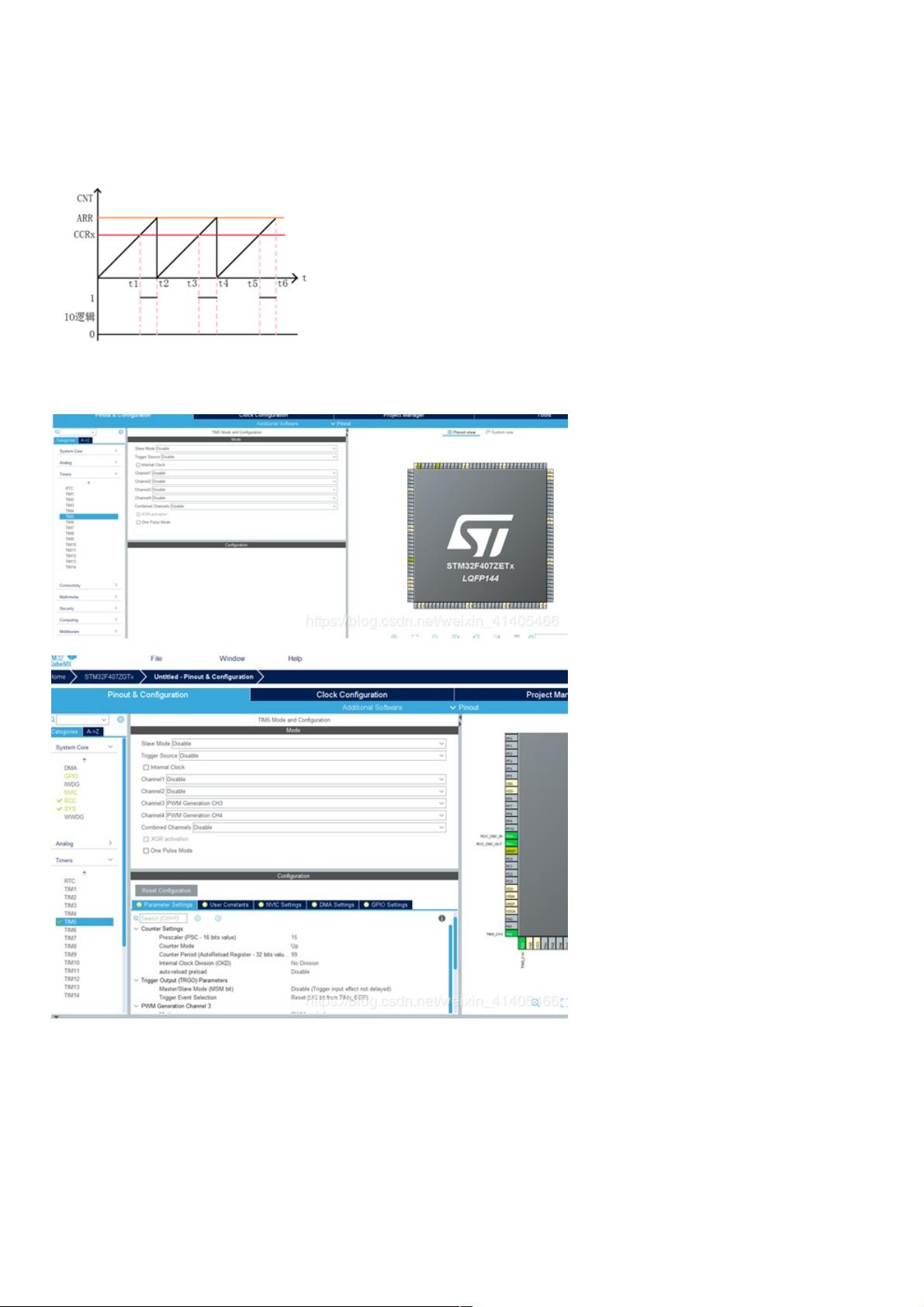
PWM通过STM32的通用定时器(如TIMx,这里的x通常为5或9)实现。TIMx_ARR寄存器负责设定信号的频率,而TIMx_CCRx寄存器则是调整占空比的关键,即脉冲高电平持续的时间与总周期的比例。
2. **电机PWM Cube配置**:
首先要识别并启用合适的定时器通道,比如TIM5的CH3被配置为PWM通道。STM32Cubemx工具用于图形化配置,确保正确映射SLAMUGV小车的底盘控制引脚。预分频和时钟计数参数的选择会影响PWM信号的精度,但这里提到暂时不做深入讨论。
3. **寄存器详解**:
- **计数器寄存器(TIMx_CNT)**:用于计数脉冲周期,随着每个脉冲的到达,计数器递增。
- **预分频寄存器(TIMx_PSC)**:用来降低主时钟频率,提高计数器的分辨率。
- **自动重装载寄存器(TIMx_ARR)**:决定PWM信号的周期长度,即每个信号的持续时间。
4. **代码实现**:
提供了GPIO初始化函数,设置了GPIOB和GPIOE的复用推挽输出模式、上拉电阻以及与定时器的连接。关键代码部分展示了PWM初始化过程,包括时钟的开启、GPIO的配置,以及对特定GPIO引脚设置为PWM模式。
通过这些步骤,用户能够了解如何在STM32硬件平台上利用HAL库来实现电机的PWM调速,这对于SLAMUGV小车或其他基于STM32的机器人项目来说,是一项基础且重要的技能。理解这些概念和技术有助于编写高效的电机控制算法,并确保车辆的精确运动控制。
slamugv小车使用说明小车使用说明–4.电机电机pwm调速调速
电机pwm调速
1.使用hal库控制电机调速
PWM概述:
PWM俗称脉冲调制 脉冲宽度调制模式可以生成一个信号,该信号频率由 TIMx_ARR 寄存器值决定,其占空比则由
TIMx_CCRx 寄存器值决定。
1.电机pwm cube配置教程
首先确认pwm使用的定时器是哪个用的是哪个通道
我们在程序按照底盘控制引脚说明配置stm32cubemx
1.打开stm32cubemx软件,pwm是通过定时器控制
根据slamugv引脚分配,TIM5 CH3 使能为PWM CH3
预分频和时钟计数这个东西,下面在讨论,我们随便设置吧
然后代码生成
3. 寄存器讲解
通用定时器框图
下载后可阅读完整内容,剩余3页未读,立即下载
3190 浏览量
3129 浏览量
127 浏览量
2023-05-16 上传
2023-06-10 上传
2022-09-24 上传
232 浏览量
2022-09-24 上传
619 浏览量

weixin_38661008
- 粉丝: 3
- 资源: 878
 我的内容管理
展开
我的内容管理
展开







