Huston低序阵列下的变胞机构构态分析与运动学仿真
需积分: 8 164 浏览量
更新于2024-08-12
1
收藏 242KB PDF 举报
本文主要探讨了变胞机构在航天器和机器人领域的广泛应用,这是一种创新的机械结构,其独特的可变形特性使其在复杂任务中的表现尤为突出。作者吴艳荣、金国丸和李东福在2006年的《机械科学与技术》杂志上发表了一篇名为"变胞机构的构态分析及其运动学仿真研究"的论文。
首先,论文采用了Huston低序体阵列这一工具来描述变胞机构的拓扑结构,这种描述方法能够有效地展示机构各部分之间的连接关系和动态变化,为后续的分析提供了坚实的基础。通过这种方式,作者对一种典型的变胞机构进行了深入的构态分析,研究了其基本工作原理和可能的运动模式。
接着,为了进一步理解变胞机构的行为,作者构建了一个齐次变换矩阵,这是运动学建模的关键步骤。齐次变换矩阵能够将空间中的点、线和面的变换统一在一个数学框架内,使得对机构运动的分析更为精确。利用这个模型,作者进行了详细的运动学仿真,模拟了机构在不同工作状态下的运动路径和速度特性。
仿真结果显示了一个重要的发现:当变胞机构在进行构态切换时,加速度会发生突变,这可能会对机构的稳定性或精度造成影响。这一现象引起了作者的关注,他们深入探究了这种加速度突变的原因,并试图寻找解决策略。通过对机构设计和控制算法的优化,他们提出了一种方法来消除或者减少这种加速度突变,从而提升机构在实际应用中的性能。
这篇论文不仅深化了我们对变胞机构的理解,还为改进这类机械结构的设计提供了实用的理论依据和技术手段。对于从事航天器和机器人技术研究的人来说,理解和掌握变胞机构的构态分析与运动学仿真方法是提升工程实践能力的重要一步。
第
25
卷第
9
期
2
脱年
9
月
机械科学与技术
MECHANICAL
SCIENCE
AND
TECHNOLOGY
Vo
1.
25
No.9
Se
ptember
2006
文章编号:
1003-8728
(2
∞
6)ω-1092
-04
变胞机构的构态分析及其运动学仿真研究
吴艳荣,金国丸,李东福
(天津工业大学机械电子学院,天津
3
∞
160)
吴艳荣
摘
要:变胞机构在航天器和机器人领城有着广泛的应用。本文用
Hωton
低序体阵列描述变胞机构的拓扑结构,
并对一种典型变胞机构进行了构态分析。用齐次交换矩阵建立了该变胞机构的运动学数学模型,并对其进行了运
动学仿真。4t佳仿真结果表明,变胞机构在构态切换时加速度有突变,进而提出了消除加速度突变的方法。
关键词:变胞机构;运动学;仿真
中图分类号
:TH
1l
2
文献标识码
:A
R
四
earch
on
Contiguration
An
aJ
ysis
and
Kinematic
Simulation
of
Metamorphic
Mechanisms
WuYanro
吨,
Jin Guoguang, Li
Don
阱
(School of Mechanical and Electric Engineering, Tianjin
Pol
严
.echnic
University, Tianjin
3
∞
160)
Abstract:
Metamorphic mechanisms are widely used in the fields of spacecrafts
and
robotics.
币
1is
pa
严
r
described their
topolo
哥
cal
structures by using the Huston
Lo
wer Numbered Arrays , and the configuration
analysis of a lypical metamorphic mechanism was carried out. Its kinamatic mathematical model was es-
tablished through using a homogeneous transformation matrix , and its kinematic simulation was
also
ac-
complished.
Th
e numerical simulation results
show
也
at
its acceleration was discontinued when the config-
urations shifted from one to another. Furthennore
, the method for
removing
出
e
discontinued acceleration
was proposed.
Key
words:
metamorphic mechanism; kinematics; siqmlation
变胞机构
(metamorphic
mechanism)
是
1999
年
J.
S.
Dai &
Ree
s
Jones[l]
首先提出的一种可变自由度和可变构
件数目的新型机构。这个概念最初是在对一些手工艺品
的机构学研究中引进的。这类机构在运动中自由度和构
件数目会发生变化,具有构态变换和高度展开、折叠的特
点。变胞机构从一种崭新的角度来研究机构学,有望对传
统机构学的机构概念及其设计方法有所突破。
戴建生和张启先
[2]
于兹别年首次在国内介绍了变胞
机构的概念和特点,运用短阵运算方法进一步对一些实例
进行了构态变换分析。金国光等
[3]
介绍了变胞机构在各
领域的应用前景,并着重介绍了在航天器和机器人技术中
的应用。随后,金国光
[4]
详细分析和研究了几类典型的变
胞机构的构态和自由度,对变胞机构进行了科学定义,并
建立了变胞机构关于结构学、运动学和动力学及冲击运动
力学在内的比较完整的机构学理论体系。
本文用
Huston
低序体阵列针对一种典型的含有闭环
收稿目期
z2
∞
'5
-08
-26
基金项目:国家自然科学基金项目
(5027.
筑脱)和天津市高等学校
科技发展基金项目
(2
∞
41103
)资助
作者简介:吴艳荣
(1982-)
,女(队)
,河南,硕士研究生
约束、并含移动副连接的变胞机构进行构态分析和运动学
仿真。
1
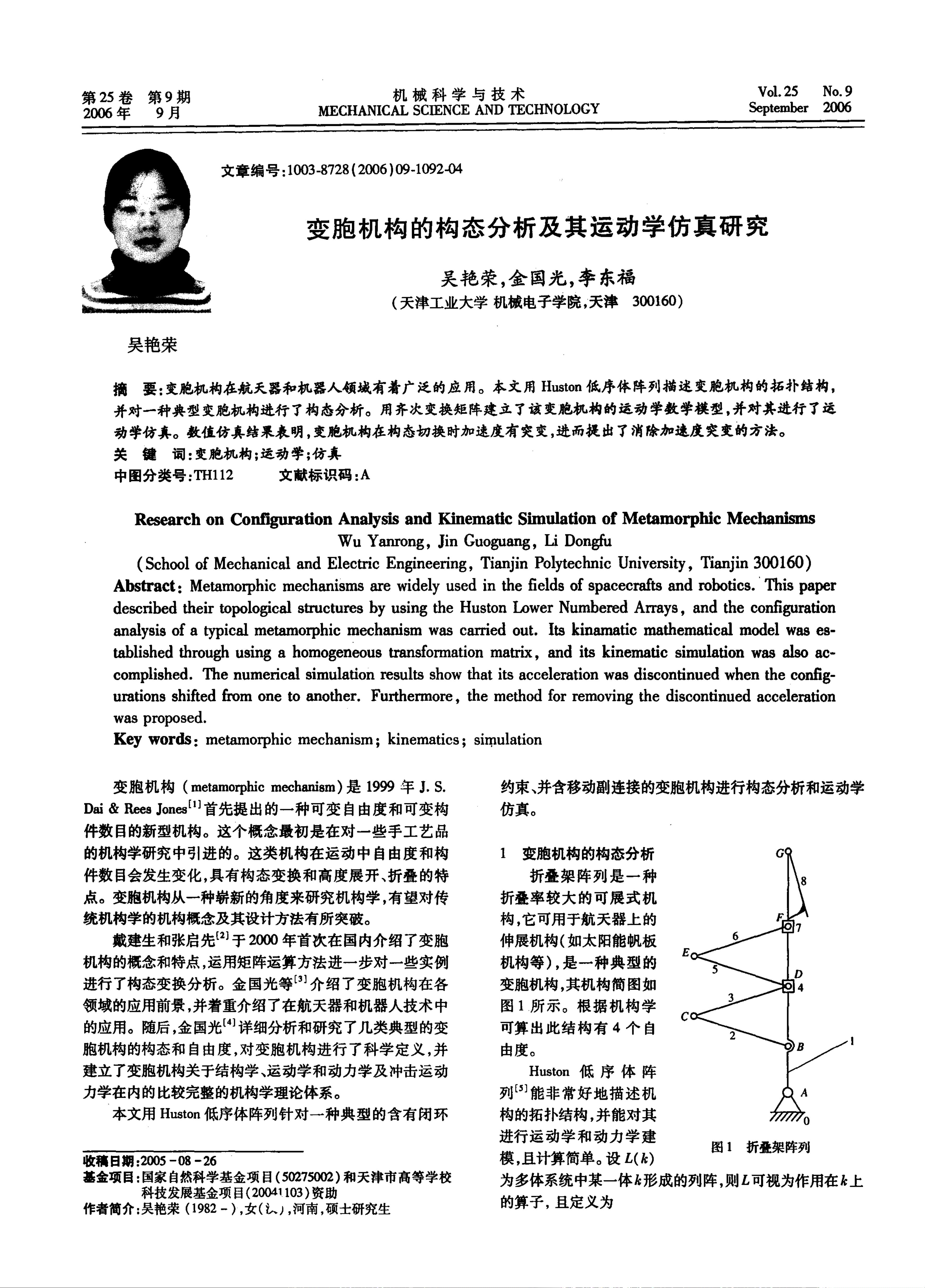
变胞机构的构态分析
折叠架阵列是一种
折叠率较大的可展式机
构,它可用于航天器上的
伸展机构(如太阳能帆板
机构等)
,是一种典型的
变胞机构,其机构简图如
图
1
所示。根据机构学
可算出此结构有
4
个自
由度。
Huston
低序体阵
列
[5]
能非常好地描述机
构的拓扑结构,并能对其
进行运动学和动力学建
模,且计算简单。设
L(k)
E
C
A
图
1
折叠架阵列
为多体系统中某一体
k
形成的列阵,则
L
可视为作用在
k
上
的算子,且定义为
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
107 浏览量
1105 浏览量
1976 浏览量
1035 浏览量
886 浏览量
797 浏览量
1405 浏览量

weixin_38691194
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Drools 4.0中文手册:重大更新与新特性概览
- C++实现的职工工资管理系统设计
- VHDL实现:电子密码锁设计与电路解析
- C#完全手册:从入门到精通
- Linux Shell:输入输出与重定向详解
- Linux高手之路:全面掌握必备技巧
- Word 2003域应用详览与快捷操作指南
- Unix Shell编程:文件名匹配与元字符应用
- Unix shell:后台执行与cron任务调度
- Unix shell深度解析:find与xargs的强大应用
- C#.NET图书管理系统详解
- DOS下C++学员管理系统源码实现
- Apache配置管理教程:红旗Linux下的实践
- 东软C方向笔试精华:选择题+编程+翻译详解
- 详解OSI七层网络结构:从物理到应用的全面解析
- Windows 2003+iis6环境下JSP Resin 2.1.16配置教程
