一阶惯性环节温度控制设计:MATLAB仿真与硬件实现
"纯滞后的一阶惯性环节设计"
在工业自动化领域,温度控制是一个常见的应用场景,而纯滞后的一阶惯性环节是这类控制系统中的典型模型。本设计旨在针对具有纯滞后特性的温度控制系统,实现一个满足特定性能指标的计算机控制系统。关键目标包括:相角裕度30°~60°,幅值裕度大于6dB,以及在-50℃至200℃的测量范围内保持0.5%的精度和0.2℃的分辨率。
首先,设计的核心是计算机控制系统结构图,它由采样环节、计算机处理、以及数模转换组成。系统工作时,采样开关在每个kT时刻打开,实时采集误差信号e(t),并将其转化为数字量e(kT)供计算机处理。计算机依据预设的控制算法决定控制量u(kT),然后通过数模转换器将数字控制量转化为模拟信号u(t),用于实时控制被控对象。
硬件设计部分,主要包括以下几个关键组件:
1. 电桥电路:用于将温度变化转化为电信号,通常采用热电偶或热电阻等传感器。
2. 放大环节:对微弱的传感器信号进行放大,确保后续电路可以有效处理。
3. 滤波电路:去除噪声,确保信号的纯净,以提高测量精度。
4. A/D转换器:将模拟信号转换为数字信号,以便计算机处理。
5. D/A转换电路:将计算机处理后的数字控制信号转换回模拟信号,驱动执行机构。
在参数计算与仿真阶段,采用MATLAB和SIMULINK工具进行系统建模和分析。通过绘制系统伯德图,评估在无控制作用下的系统性能,并设计最少拍控制算法以达到所需的相角裕度和幅值裕度。此外,还分析了单位阶跃响应、阶跃干扰信号和随机信号影响下的系统输出,以检验系统的稳定性和抗干扰能力。
在控制算法的选择上,可能涉及PID控制、最少拍控制或者自适应控制策略。例如,文中提到了达林算法,这是一种优化控制算法,可用于改善系统性能。
最后,对系统进行了可靠性和抗干扰性分析,这是确保系统在实际运行中稳定运行的关键。这可能涉及到硬件冗余设计、抗噪声滤波技术以及故障检测与诊断机制的构建。
这个设计涵盖了从系统需求分析、硬件电路设计、控制算法选择到软件编程和仿真验证的全过程,充分体现了理论与实践相结合的原则,对于理解和掌握温度控制系统的计算机控制有重要价值。
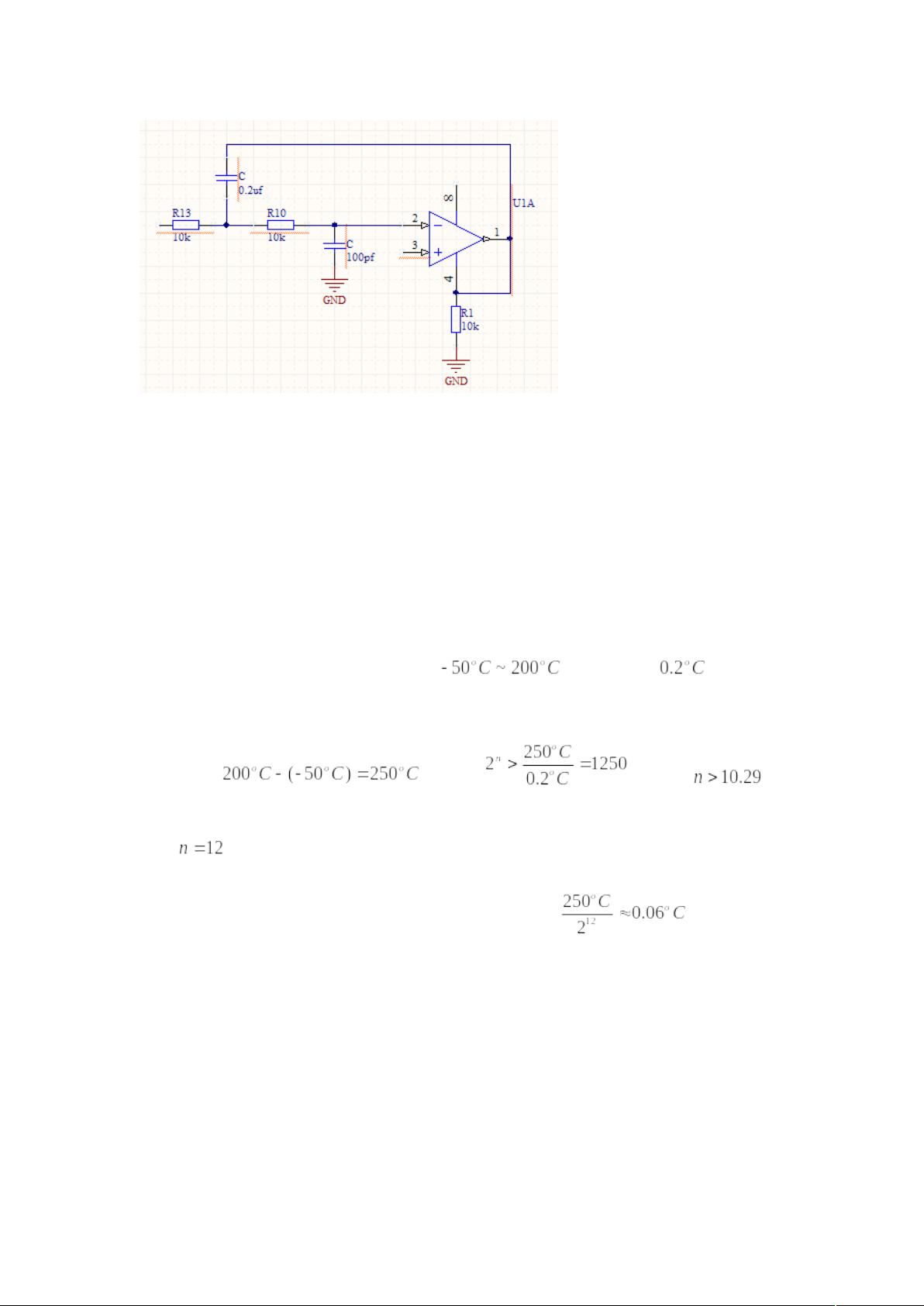
图中 为 7:, 为 ;:/9%9%#,低通滤波器的上限频率略等于
<=,而且设定放大倍数为 。
4、A/D 转换器
根据题目要求,温度测量范围为 ,分辨率为 ,则测量
是量程为 ,再由 ,可得 。
可取 ,即采用 位的 和 位的 。
当采用 位 进行模数转换时/其分辨率为 ,远远满足
设计要求。可采用 芯片。电路图如下:
剩余33页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-08 上传
2023-07-27 上传
2023-07-10 上传
2023-05-29 上传
2024-10-28 上传
2023-06-02 上传

kpjeff
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 使用FLEX 和 Actionscript开发FLASH 游戏(二)
- Linux 那些事儿之我是U 盘
- Cache在嵌入式处理器中的使用问题
- 老友记(friends)词频统计.txt
- 使用FLEX 和 Actionscript开发FLASH 游戏(一)
- sap 增强 badi userexit customerexit
- 信息系统安全技术.doc
- Spring+Struts+Hibernate的详解课件.pdf
- WPF入门电子书--新手入门的开始
- 代码找茬游戏 PHP
- matlab统计函数
- llinux设备驱动程序(第三版)
- linux内核完全注释
- 内存DC介绍及其使用
- 难得的EXTJS中文手册
- asp 生成 html 代码
