PMVS-2:高精度多视角三维重建算法解析
需积分: 21 180 浏览量
更新于2024-07-15
收藏 923KB PPT 举报
"PMVS-2.PPT - 一种基于补丁的多视图立体重建算法,用于实现高精度、高完整性的三维重建。由Yasutaka Furukawa和Jean Ponce开发,提供了开源代码。PMVS2适用于32位Windows系统,由Pierre Moulon修改。该软件处理一组照片和相机参数,输出密集的带有颜色的三维点云。主要涉及的概念包括摄像机坐标系、P矩阵、F矩阵和patch。"
**PMVS简介**
PMVS(Patch-based Multi-view Stereo)是一种用于多视角三维重建的算法,由Yasutaka Furukawa和Jean Ponce在2007年提出。它的主要目标是通过一系列照片和对应的相机参数来精确地重建场景的三维结构。在2009年,开发者发布了PMVS的第二个版本,即PMVS2,该版本对原始算法进行了优化,并适配了包括32位Windows在内的多种平台。PMVS2的一个显著特点是它能够自动忽略非刚性物体,比如行人,专注于重建刚性结构。输出的结果是一组带有颜色和法向量的密集三维点云。
**基本概念**
1. **摄像机坐标系**:摄像机坐标系是以摄像机中心为原点,Z轴指向摄像机的主光轴,即穿过原点并垂直于图像平面的光线;X轴与图像平面的x轴平行,Y轴与图像平面的y轴平行。
2. **P矩阵**:P矩阵是计算机视觉中的一种关键概念,它代表了相机的投影矩阵,用于将三维空间中的点映射到二维图像平面上。P矩阵是一个3x4的矩阵,包含了相机的内外参数,可以用来进行投影计算。
3. **F矩阵**:F矩阵,也称为基础矩阵,是描述两个相机之间相对位置和方向的矩阵,主要用于计算两幅图像间的对应点关系。
4. **patch**:在PMVS算法中,patch是指图像中的一小块区域,通常用于比较不同视图间的相似性,帮助确定像素间的对应关系,从而实现立体匹配和三维重建。
**算法流程**
PMVS算法的核心是基于补丁的立体匹配。其大致步骤包括:
1. **初始化**:输入是一组照片及其对应的P矩阵,这些矩阵描述了相机的位置和姿态。
2. **补丁提取**:从每张照片中提取一系列的小区域(补丁),这些补丁在不同视图中应该对应相同的部分。
3. **视图间匹配**:通过比较不同视图间的补丁,寻找最佳匹配,以确定同一物体表面的对应点。
4. **深度估计**:利用匹配的补丁,通过立体匹配方法计算每个点的深度信息,从而构建三维点云。
5. **点云融合**:将所有视图的深度信息整合,形成一个稠密的三维点云模型,并估计每个点的法向量。
6. **后处理**:去除噪声和不一致的点,提高重建的准确性和稳定性。
PMVS是一种高效且精确的多视图三维重建工具,它利用补丁匹配和深度估计技术,能够在复杂场景中生成高质量的三维模型。对于研究人员和实践者来说,理解这些基本概念和算法流程对于利用PMVS进行三维重建至关重要。
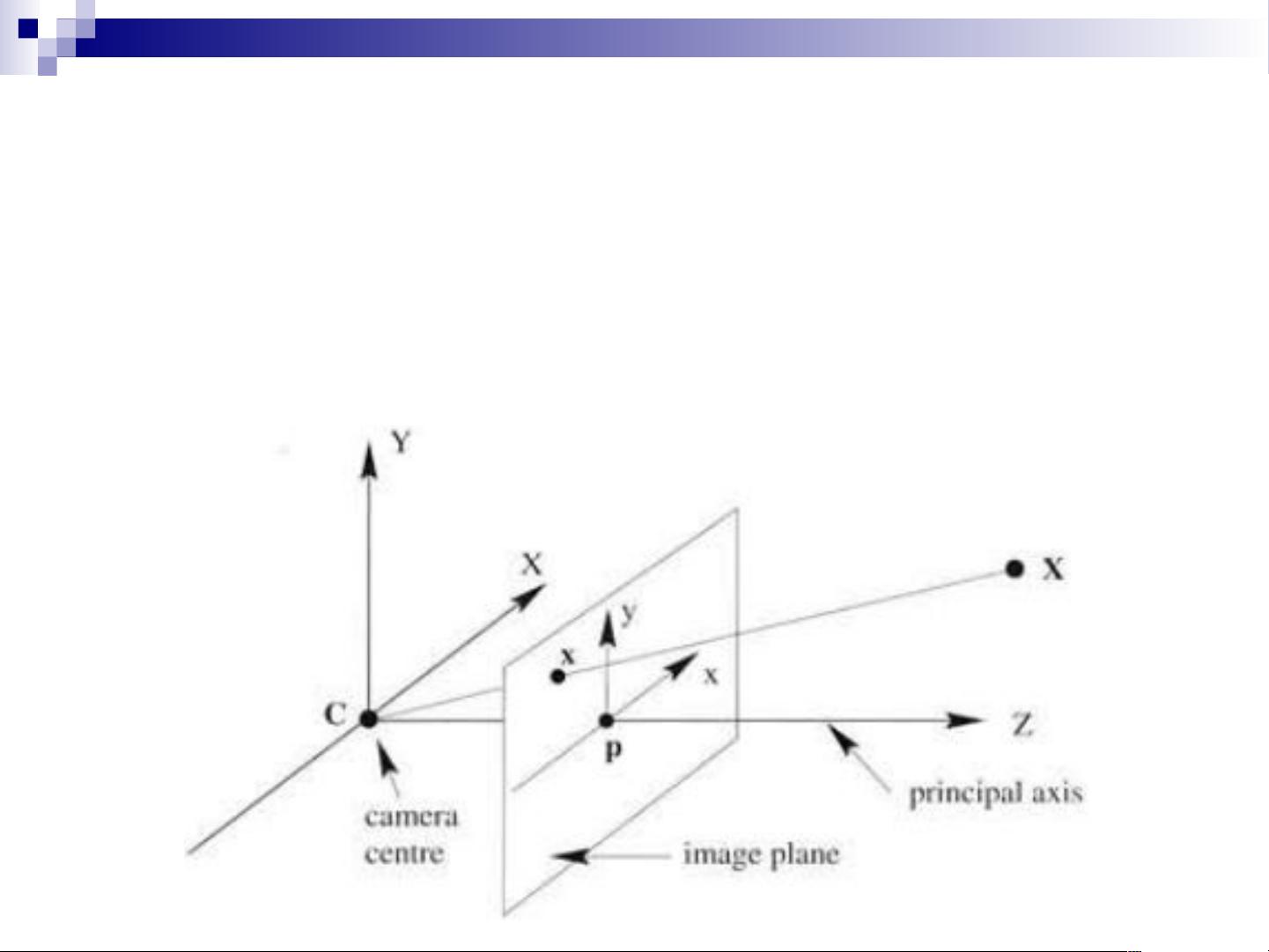
摄像机坐标系
原点为摄像机中心, 2 轴为过原点垂直于像平面的光线
3 主光轴 4 , 5 轴平行于像平面坐标系的 / 轴, 轴平行
于像平面坐标系的 6 轴。
! 基本概念:
剩余26页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-14 上传
2017-02-11 上传
2021-05-19 上传
2020-06-25 上传










