ROS入门指南:构建机器人程序
下载需积分: 7 | PDF格式 | 1.72MB |
更新于2024-07-18
| 29 浏览量 | 举报
"这篇文档是Jason M. O'Kane所著的《A Gentle Introduction to ROS》,主要介绍了ROS(Robot Operating System,机器人操作系统)的基础知识和应用。这本书旨在引导读者了解ROS,展示其在机器人软件开发中的作用,并逐步教授如何使用ROS进行编程。
ROS是机器人领域的一个核心框架,它提供了一套工具、库和协议,用于帮助开发者构建复杂的机器人软件。ROS允许不同硬件平台上的软件组件通过标准化的消息传递机制进行通信,从而简化了跨平台的机器人系统开发。
文档第一章“Introduction”简要介绍了ROS的基本概念和它在机器人技术中的重要性。作者可能会讨论ROS的设计理念,以及它如何促进机器人软件的模块化和复用性。
第二章“Getting started”会引导读者安装ROS,并介绍一些基础概念,如工作空间、包和节点。这部分内容通常包括设置开发环境、创建和运行第一个ROS节点的步骤。
第三章“Writing ROS programs”则深入到实际编程中,讲解如何编写发布和订阅消息的ROS程序。这涉及到ROS中的消息类型、节点间通信和话题(topics)的概念。
第四章“Log messages”涉及日志记录,这是调试和监控ROS系统的关键部分。读者将学习如何生成和查看ROS的日志信息,这对于诊断问题和优化性能至关重要。
第五章“Graph resource names”解释了ROS如何解析节点、话题、参数和服务的名称,这是理解ROS网络通信的基础。
第六章“Launch files”介绍了启动文件(launch files),这是一种可以同时配置和运行多个ROS节点的工具,这对于复杂系统的部署非常有用。
第七章“Parameters”讲述了如何使用ROS参数来配置节点的行为。参数服务器是ROS中一个强大的特性,允许动态调整节点的运行时参数。
第八章“Services”涵盖了ROS服务,这是节点间异步通信的一种方式,允许请求-响应模式的交互,通常用于执行一次性任务或获取即时数据。
整个文档通过实例和逐步指导,帮助读者掌握ROS的核心概念和实践技能,无论你是机器人领域的初学者还是有经验的开发者,都能从中受益。"
1. INTRODUCTION
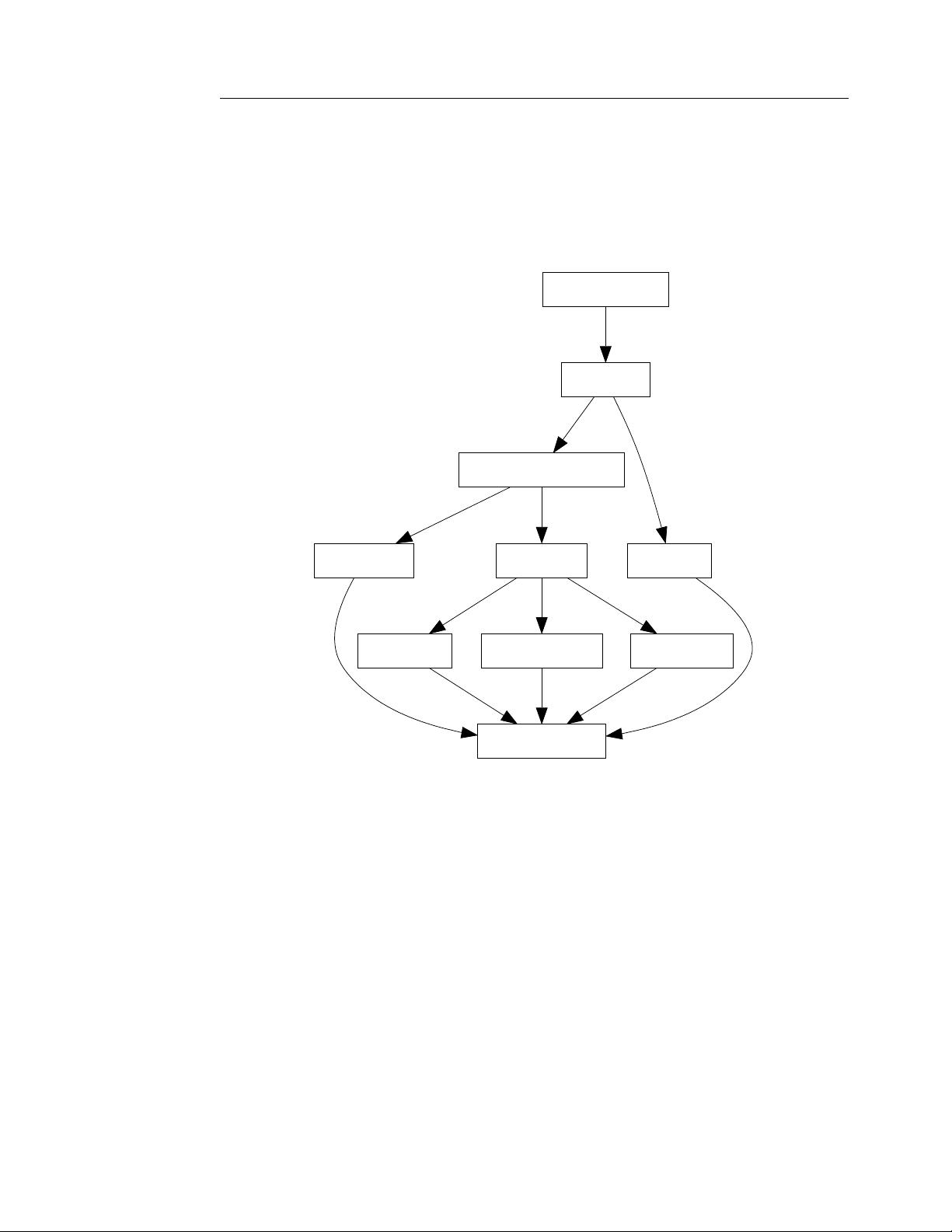
1. Introduction
2. Basics
3. Publish/Subscribe
9. Bags4. Logging 5. Names
10. Conclusion
6. Launch 7. Parameters 8. Services
Figure 1.1: Dependencies between chapters.
6


剩余165页未读,继续阅读
相关推荐





woaihulue
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 设置Windows 10 1903/1909/2004的脚本-.NET开发
- 一个TCP和UPD聊天、传收文件程序
- Homework-QUestion
- MTK10.0竖屏壁纸居中补丁.zip
- xiubox
- 键盘测试工具,机械键盘换轴后检测用
- echidna:W3C的新发布工作流程-主要组件
- Vue Devtools
- SoapUI(附安装步骤).rar
- pid控制器代码matlab-CDC18a:A.Selivanov和E.Fridman,“PID控制器的鲁棒采样数据实现”,在第57届IEEE
- animeWiki
- mcjoin:简单的多播测试应用程序
- abc:aa
- Asc2Silo file converter-开源
- 行业文档-设计装置-一种拱桥施工平台结构.zip
- BE2Works_v4.52_Bohol_fu11.7z
