opencv3.2 for ARM Linux移植实战与环境配置
本篇文档是关于OpenCV 3.2在ARM Linux平台(如全志H3开发板上的Orangepi PC)移植的详细笔记。作者Bob Liang于2017年6月24日编写,主要目的是在资源受限的目标板上使用OpenCV进行图像处理,特别是轨迹检测,以驱动步进电机。移植过程中涉及到的主要步骤包括:
1. **背景与环境设置**:
- 开发环境构建在Ubuntu 16.04 x86版本的电脑上,以提升网络更新速度;
- 安装了arm-linux-gnueabihf交叉编译器和相关工具,如gcc和g++,以及CMake和cmake-qt-gui,以支持在电脑上进行交叉编译。
2. **OpenCV安装与配置**:
- 将OpenCV 3.2下载并解压到指定目录(/usr/opencv3.2);
- 创建两个临时目录:/usr/opencv-arm用于编译,并设定/usr/local/arm/lib/opencv3.2为目标安装位置;
- 使用cmake-gui配置OpenCV,选择arm-linux交叉编译器,确保操作系统选择Linux,避免混淆。
3. **编译步骤**:
- 运行cmake-gui,根据项目的具体需求调整参数,可能涉及库链接、编译选项等;
- 配置完成后,执行cmake生成Makefile,再通过make命令进行编译,生成动态链接库(.so文件)。
4. **问题与解决**:
- 在电脑上进行交叉编译时可能会遇到各种问题,如依赖项缺失、编译错误等。关键在于确保配置正确,解决跨平台兼容性问题。
5. **最终目标**:
- 通过一系列步骤确保OpenCV库能在目标板的Linux环境中正常运行,最终目的是将编译好的应用软件搬运到目标板并执行。
整个过程中,作者强调了在电脑上进行交叉编译的重要性,以及实际在目标板上编译OpenCV库的必要性,因为这直接影响到最终的运行效果。这份笔记对于有类似硬件移植需求的开发者来说,是一份宝贵的参考资料。
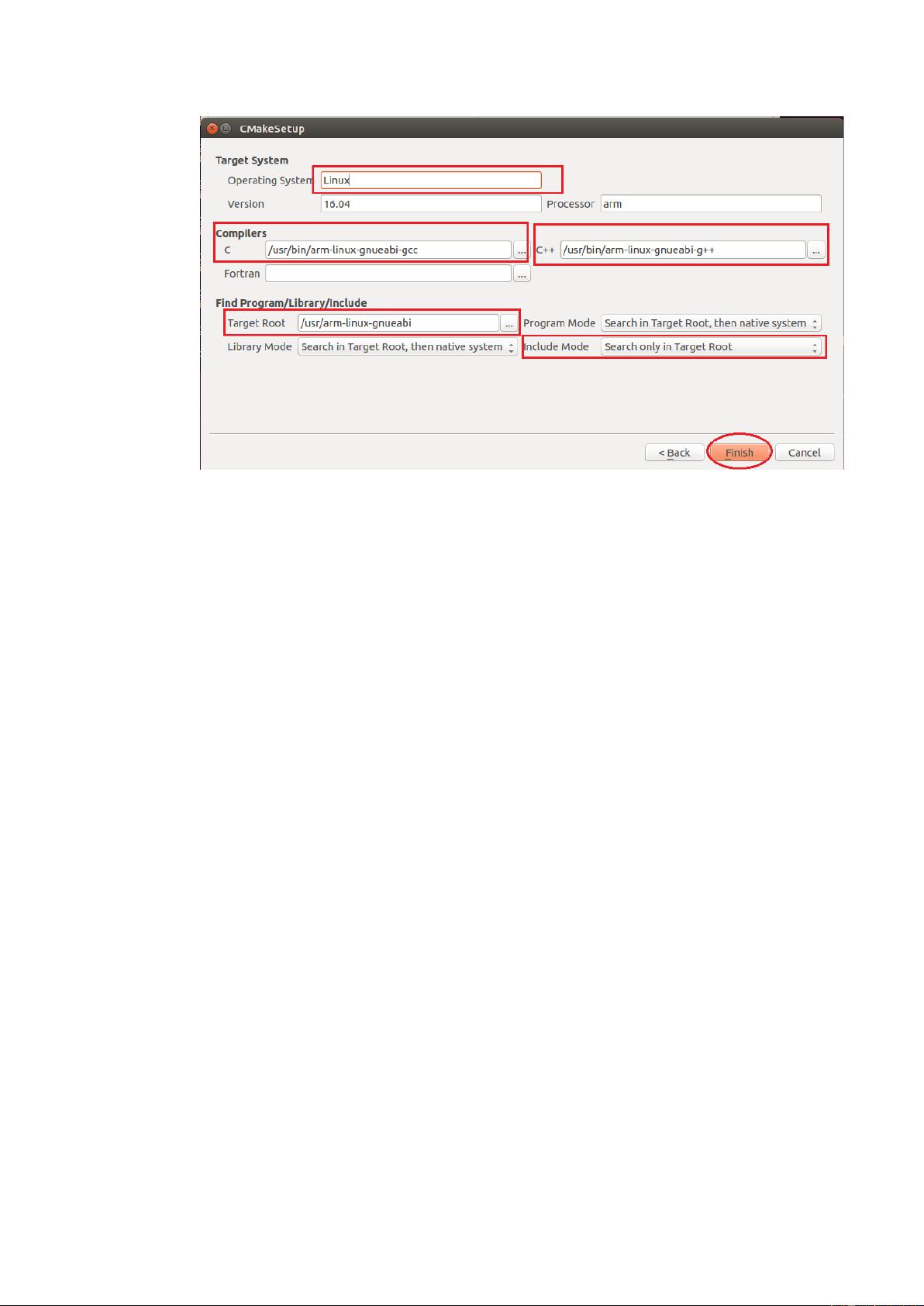
Operation System 要写 Linux,如果 linux 则不会被识别。另外,如果在目标板直
接编译似乎可以直接用 gcc/g++来编译。
8) 点击 cmake-gui 界面上的 configure 配置生成交叉编译所使用的文件。
这个路径/usr/local/arm/lib/opencv3.2是编译后用make install安装最终结果的路径
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-04-08 上传
2022-07-14 上传
2022-07-13 上传
2020-03-31 上传
2021-10-04 上传

liangzh2011
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
