深入解析工业机器人动力系统:从基础到应用
PPT格式 | 1.88MB |
更新于2025-03-20
| 141 浏览量 | 举报
1. 工业机器人的动力系统的组成
工业机器人的动力系统是由多个组件构成,它包括动力源、动力传输部分、执行机构和控制系统等。动力源主要是电能或流体能等,通过控制系统发出的指令信号驱动动力元件,进而使得机器人完成指定的工作任务。动力系统的类型包括液压动力系统、气动动力系统和电动动力系统等。
2. 交流伺服动力系统
交流伺服动力系统是目前工业机器人中应用非常广泛的动力系统类型之一。它主要依赖交流伺服电机,其控制精确,响应速度快,适合精确的位置控制和速度控制。交流伺服动力系统的优点在于能够提供稳定的动力输出,维护简单,适用于多数工业应用场景。
3. 直流伺服动力系统
直流伺服动力系统通常使用直流伺服电机作为动力源。与交流伺服系统相比,直流伺服系统具有较好的调速性能,可以实现更高精度的控制。但直流伺服系统相较于交流系统,存在碳刷和换向器的磨损问题,这会影响其使用寿命,且维护成本相对较高。
4. 液压气动系统主要设备及特性
液压气动系统是利用液体或气体作为动力介质的系统。液压系统主要包括液压泵、控制阀、执行元件(如液压缸或液压马达)、辅助元件(如油箱、过滤器)等。液压系统的优点是能够提供很大的驱动力,并且响应快,适用于重负载和快速动作的应用场景。但液压系统密封要求高,泄漏问题和油温变化可能导致性能不稳定。
气动系统主要由空气压缩机、气动元件(如气缸、气阀)、控制元件(如压力调节器、方向控制阀)等组成。气动系统的优点在于成本较低,结构简单,可靠性高,维护方便。但由于气体的可压缩性,其控制精度一般低于液压系统。
液压气动系统的特性包括:
- 快速响应:液压和气动系统通常都能提供快速的响应时间。
- 结构标准化:液压和气动元件的制造和组装标准化程度较高。
- 密封问题:液压系统中,密封问题是个需要重点关注的问题,油液的泄漏会污染环境,且可能导致系统故障。
- 应用领域广泛:根据不同的需要,液压和气动系统适用于汽车制造、航空航天、食品包装、物料搬运等多个工业领域。
总结来说,工业机器人的动力系统是实现机器人运动的基础,具有多种类型,不同的动力系统根据其特点适用于不同的工业应用。在设计和选择工业机器人动力系统时,需要综合考虑机器人的工作环境、负载需求、精确度要求、成本预算等因素。
第四章 工业机器人动力系统
工
工
业
业
机
机
器
器
人
人
技
技
术
术
基
基
础
础
4.1.2 工业机器人的动力系统的组成
2.工业机器人传动机构的组成
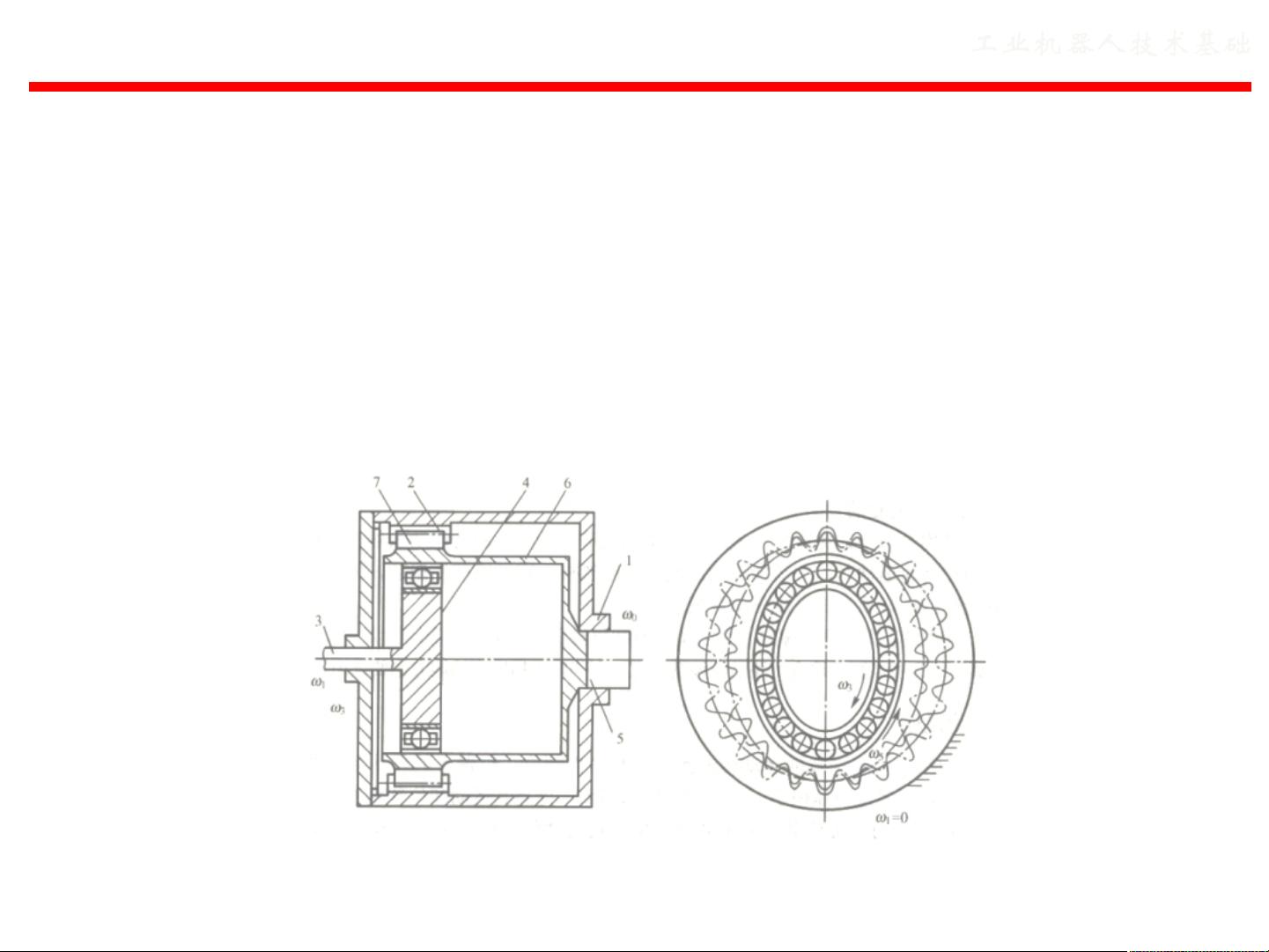
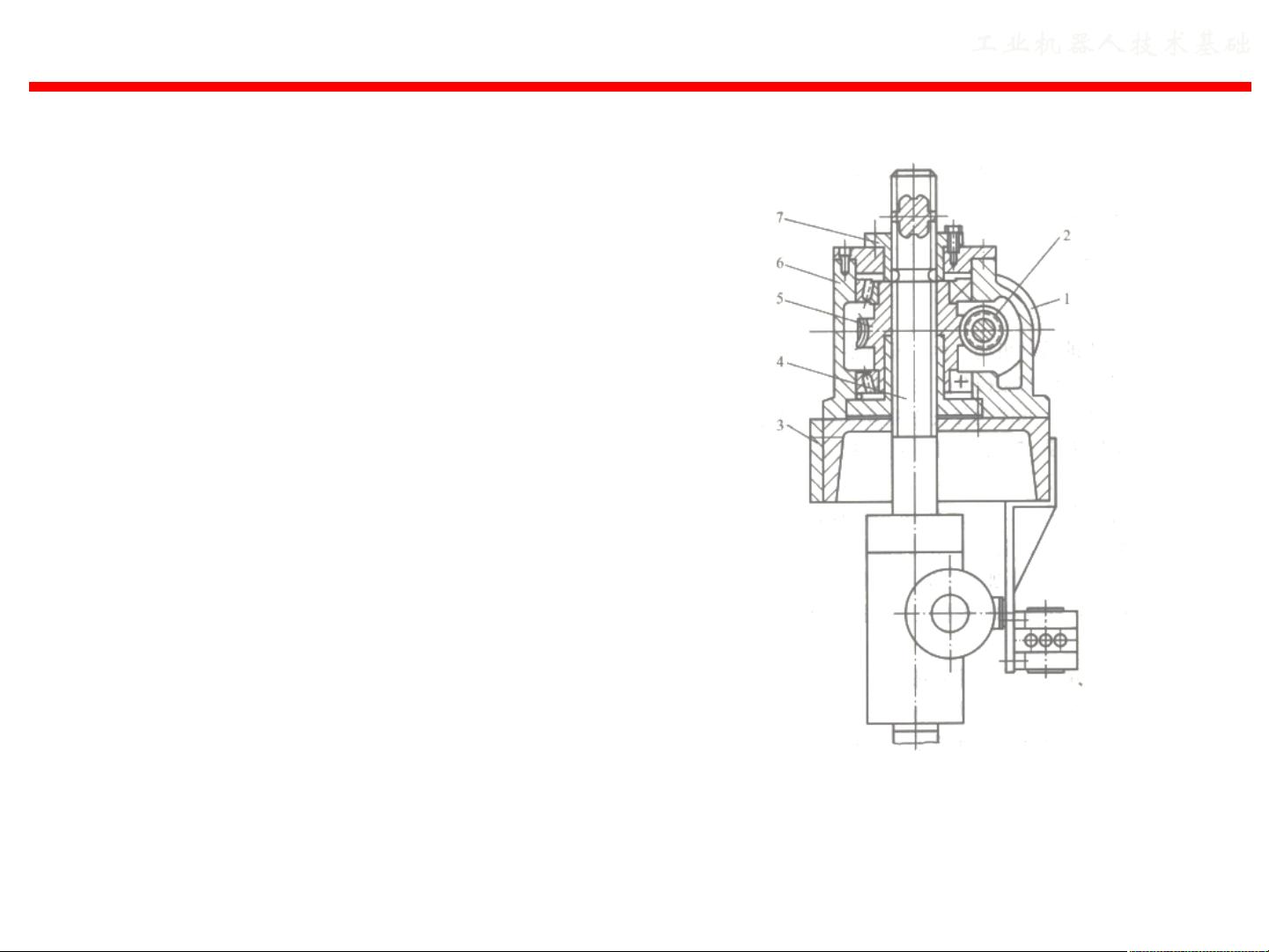
(1)谐波传动机构
谐波传动机构的结构
谐波发生器通常由凸轮或偏心安装的轴承构成。刚轮为刚性
齿轮,柔轮为能产生弹性变形的齿轮。当谐波发生器连续旋
转时,产生的机械力使柔轮变形,变形曲线为一条基本对称
的谐波曲线
剩余41页未读,继续阅读
相关推荐





yousuotu
- 粉丝: 191
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深度学习笔记:Python3环境下机器学习算法实践
- 凡客诚品Jsp项目:购物车与Ajax技术整合
- SuperOneClickv1.9.1-ShortFuse工具下载
- Java并发编程实战源码下载与解析
- FrankerFaceZ开源项目优化:以Ticker替换After()提高效率
- CHM文件转换工具:将CHM转换为TXT/PDF/Word
- 掌握机器学习分类技术:从线性到SVM算法解析
- 目标检测数据增强技术与VOC格式二进制文件实践
- CListCtrl控件的编辑功能实现方法
- 实现系统图标绑定功能,优化应用启动体验
- Lifesting编码转换插件:批量处理Eclipse/Myeclipse项目文件
- Spoon Gradle插件1.2.5版本发布
- Cewolf图形库与JFreeChart集成教程及源码分享
- Struts2框架必备jar包清单指南
- C++上机练习题:循环、指针、递归与排序深度解析
- 官方固件升级与工具箱补丁包下载指南
