KUKA机器人操作系统与编程快速指南
需积分: 5 152 浏览量
更新于2024-07-02
收藏 18.25MB PDF 举报
"该资源是KUKA机器人系统的操作及编程指南,经过整理,去除了无用的空白页,使得阅读和查询更加便捷。涵盖了KUKA smartPAD手持编程器的使用、KUKA smartHMI操作界面的各项功能,包括键盘、状态栏、驱动装置状态显示等,并详细介绍了如何接通和控制机器人控制系统,启动和结束KSS,以及如何进行语言设置、用户组更换和运行方式切换。此外,还详细讲解了手动运行机器人的各种模式和选项,如坐标系、手动倍率设定、工具和基础系选择,以及空间鼠标的操作。同时,指南还包括显示功能如能耗测量、位置显示、输入/输出端的状态等,对操作和编程新手非常实用。"
此文档详细阐述了KUKA机器人系统的操作和编程流程,是用户理解和操控KUKA机器人的关键参考。首先,介绍了库卡smartPAD手持编程器的前端和后端接口,以及如何安装和移除设备。接着,详述了KUKA smartHMI操作界面,包括其键盘布局、状态栏的功能,以及驱动装置状态显示和移动条件窗口的解读。
文档还指导用户如何启动和关闭机器人控制系统,以及如何启动KUKA系统软件(KSS),并提供了在不同情况下结束或重启KSS的方法。对于语言设定,用户可以根据需求调整操作界面的语言。此外,指南还教授了如何在smartPAD上截屏,以及如何访问在线文献和获取帮助。
在编程和操作部分,用户可以学习到如何在不同的用户组之间切换,以及如何在不同运行模式间转换。关于坐标系的使用,指南详细讲解了如何手动运行机器人,包括窗口手动移动的各种选项,如使用选项卡、按键、鼠标以及KCP项号进行移动。手册还详细介绍了手动倍率(HOV)的设定,选择刀具和基础系,以及如何通过运行键进行轴向或笛卡尔坐标的移动。
此外,文档还涵盖了空间鼠标的配置和使用,包括定位和笛卡尔坐标移动。还有增量式手动模式和附加轴的手动运行。对于安全监控,如桥接工作空间监控也有说明。在显示功能部分,用户可以学习如何查看能耗、实际位置、数字和模拟输入/输出端的状态,以及如何查看和修改变量值,这些都是进行有效监控和调试的重要工具。
这份KUKA系统手册是用户全面掌握KUKA机器人操作系统和编程的关键参考资料,对于想要深入理解和操作KUKA机器人的人员来说,具有极高的价值。
45 / 455发布日期 :18.04.2018 版本 :KSS 8.3 SI V7
4 操作
4.2.1 键盘
smartPAD 配备一个触摸屏: smartHMI 可用手指或指示笔进行操作。
smartHMI 上有一个键盘可用于输入字母和数字。 smartHMI 可识别到,什么时
候需要输入字母或数字并自动显示键盘。
键盘只显示需要的字符。 例如如果需要编辑一个只允许输入数字的栏,则只
会显示数字而不会显示字母。
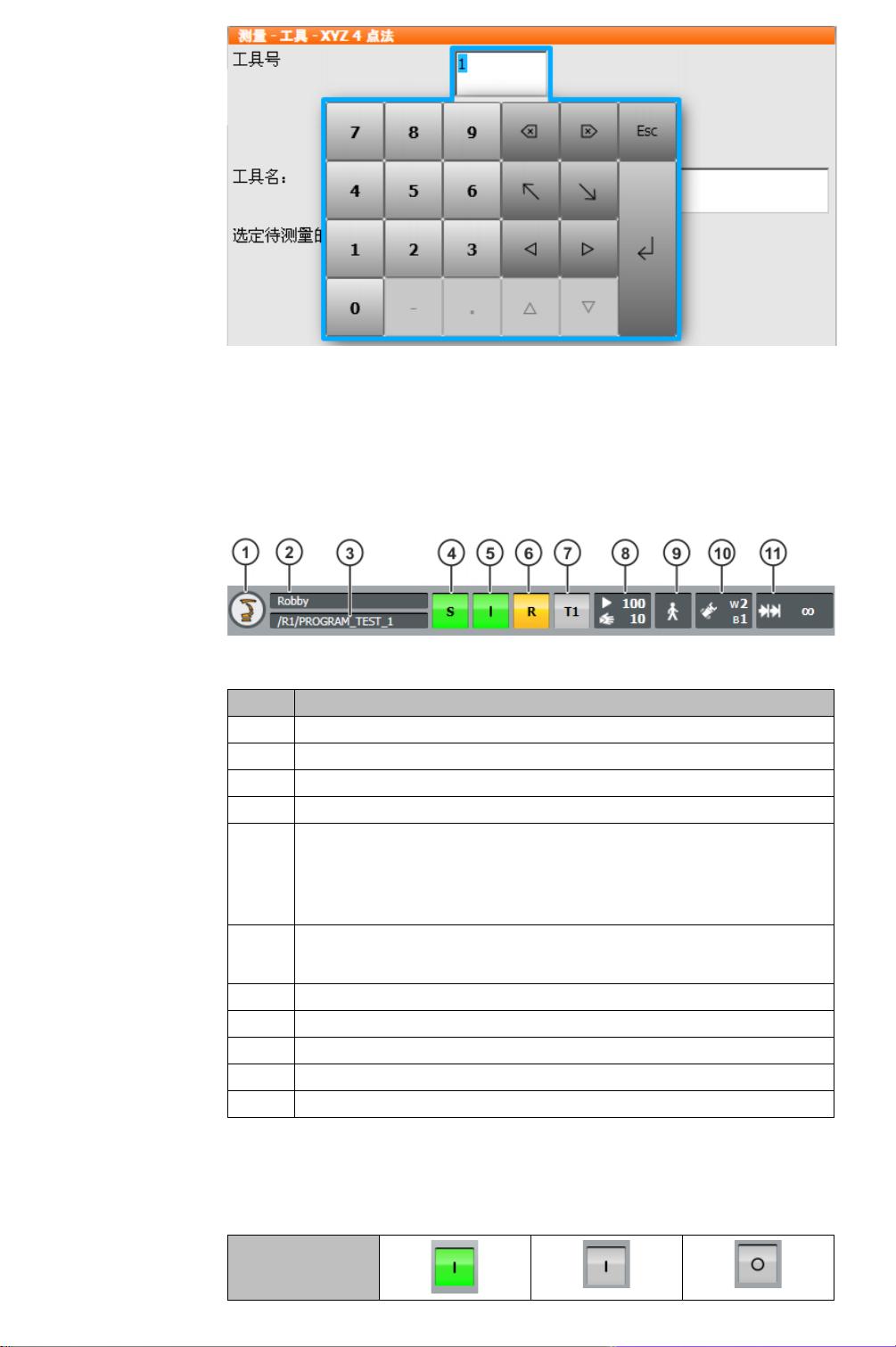
5显示空间鼠标定位
触摸该显示会打开一个显示空间鼠标当前定位的窗口,在窗口中可
以修改定位。
(>>>4.15.8" 确定空间鼠标的定位 " 页面 66)
6 状态显示运行键
该显示可显示用运行键手动移动的当前坐标系。触摸该显示就可以
显示所有坐标系并可以选择另一个坐标系。
7 运行键标记
如果选择了与轴相关的移动,这里将显示轴号 (A1、A2 等)。如
果选择了笛卡尔式移动,这里将显示坐标系的方向 (X、Y、Z、A、
B、C)。
触摸标记会显示选择了哪种运动系统组。
8 程序倍率
(>>>8.5" 设定程序倍率 (POV)" 页面 240)
9 手动倍率
(>>>4.15.3" 设定手动倍率 (HOV)" 页面 63)
10 按键栏。这些按钮自动进行动态变化,并总是针对 smartHMI 上当
前激活的窗口。
最右侧是按钮编辑。用这个按钮可以调用导航器的多个命令。
11 WorkVisual 图标
通过触摸图标可至窗口 项目管理。
(>>>7.11.3" 项目管理窗口 " 页面 227)
12 时钟
时钟显示系统时间。触摸时钟就会以数码形式显示系统时间以及当
前日期。
13 显示存在信号
如果显示如下闪烁,则表示 smartHMI 激活。
左侧和右侧小灯交替发绿光。交替缓慢 (约 3 秒)而均匀。
序号 说明
剩余405页未读,继续阅读
1198 浏览量
2084 浏览量
点击了解资源详情
432 浏览量
536 浏览量
719 浏览量
288 浏览量
2849 浏览量

weixin_41853894
- 粉丝: 0
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- pev2:Postgres解释可视化工具2
- U26fog
- Flash+C#在线拍照源码_图片动画网站.rar
- kzzeksnd.zip_kzze
- GreedyNN
- 华为软件设计方案模板
- SSE-Github:该存储库包含博客的演示应用程序
- 丛林铁轨
- 高斯白噪声matlab代码-WMC-Project---MATLAB-simulation-of-RSS-based-channel-mode
- Tweed.
- EloFix
- vb屏幕取词 很简单的一个程序
- 百度离线地图实现绘制路径并打点示例
- pgbouncer:PostgreSQL轻量级连接池
- Trajax
- 滴滴快的智能出行平台数据2016年8月-西安-数据集
