第十八届智能车竞赛:目标检测教程详解与实战
版权申诉
本篇教程是针对第十八届智能车竞赛智能视觉组的目标检测部分,为参赛者提供全面的指导。竞赛规则在延续去年的基础上有所调整,增加了对无框图片的识别挑战,不再提供坐标信息,这对于参赛队伍提出了更高的技术要求。NXP作为合作伙伴,为了解决这一问题,提供了目标检测这一神经网络模型,以帮助车辆在复杂环境中自主定位目标。
教程首先推荐观众回顾NXP与逐飞科技的两场直播分享,通过 BV1is4y1b733 和 BV1A24y1g7yH 这两个链接观看,了解目标检测的理论基础和实现方法。直播中详细阐述了目标检测的原理,展示了模型的实际效果,为后续教程打下了坚实的基础。
教程内容分为五个部分,包括:
1. 软件安装:
- 首先,选手需要安装Python 3.10.x版本,从提供的 python-3.10.7-amd64.exe 安装包开始。安装过程中,确保勾选必要的选项并自定义安装路径。
- 安装完成后,可以通过运行窗口验证Python是否成功安装。
2. 图像标注:这是目标检测的第一步,选手需要对训练数据集中的图片进行标注,为模型提供学习样本,包括目标的位置和类别信息。
3. 数据集创建:根据标注结果,构建符合竞赛需求的数据集,用于训练和验证模型性能。
4. 模型训练:利用深度学习框架(如TensorFlow或PyTorch)进行模型训练,优化模型参数以提高目标检测的准确性和鲁棒性。
5. 模型导出与部署:训练完成后,将模型转换为OpenARTmini支持的格式,并将其集成到实际的智能车硬件中,如OpenMV平台。
6. OpenARTmini实现:在OpenARTmini上测试和优化模型,确保它能在竞赛环境中快速响应并精确识别目标。
教程最后提供了下载链接和提取码,以便参赛者获取全部所需文件进行实践。通过这个教程,参赛者不仅能够理解目标检测在智能汽车竞赛中的应用,还能掌握具体的技术实施步骤,提升比赛胜算。
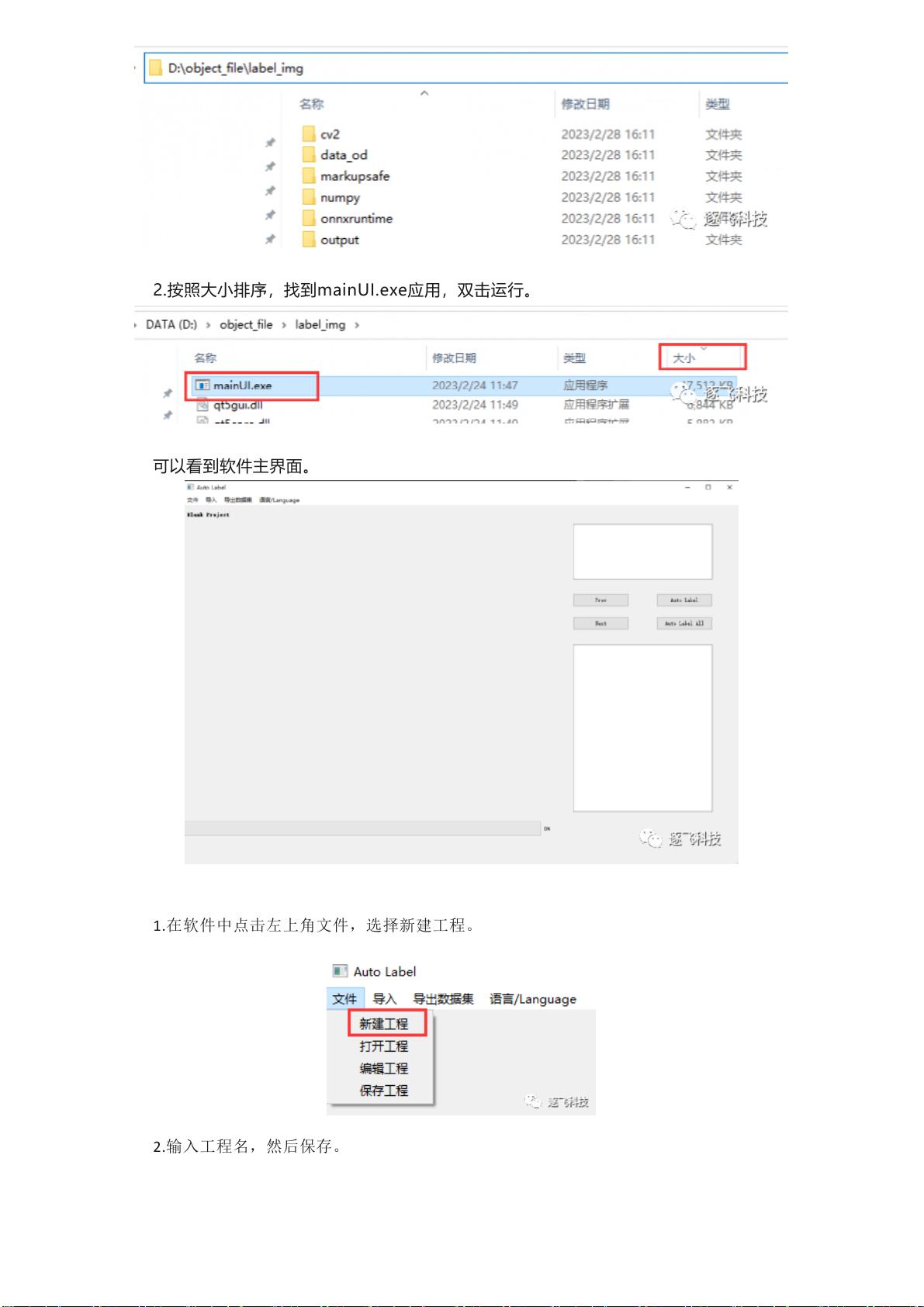
2.按照大小排序,找到mainUI.exe应用,双击运行。
可以看到软件主界面。
2.2、创建工程
1.在软件中点击左上角文件,选择新建工程。
2.输入工程名,然后保存。
剩余19页未读,继续阅读
446 浏览量
551 浏览量
312 浏览量
312 浏览量
2024-12-28 上传
681 浏览量
169 浏览量

阿拉伯梳子
- 粉丝: 2700
- 资源: 5734
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vaporwave Wallpapers New Tab Theme-crx插件
- ioBroker.easee:easee是带有REST-API的壁盒。 ioBroker的此适配器可用于将壁盒连接到您的家庭环境
- 小魏月老交友盲盒v1.0.30
- 中型企业网交换与路由设计
- Marshmello Wallpapers New Tab Theme-crx插件
- gin_bbs:Gin BBS应用程序
- proj1:COMP180:proj1
- Java-project
- UEditor.rar
- Spark-studio:搜索和使用NASA媒体
- ffr-PWDFT:穷人密度泛函理论程序
- Halcon手机摄像头图像表面的轻微缺陷检测.rar
- Ionic 4 Cross Platform Android和IOS App入门
- 使用Python自动化现实世界的任务:最后一门课程,带有Python专业证书的Google IT自动化
- 易语言-仓库货位条码打印
- django-two-factor-auth:完整的Django双重身份验证,可轻松集成到大多数Django项目中
