
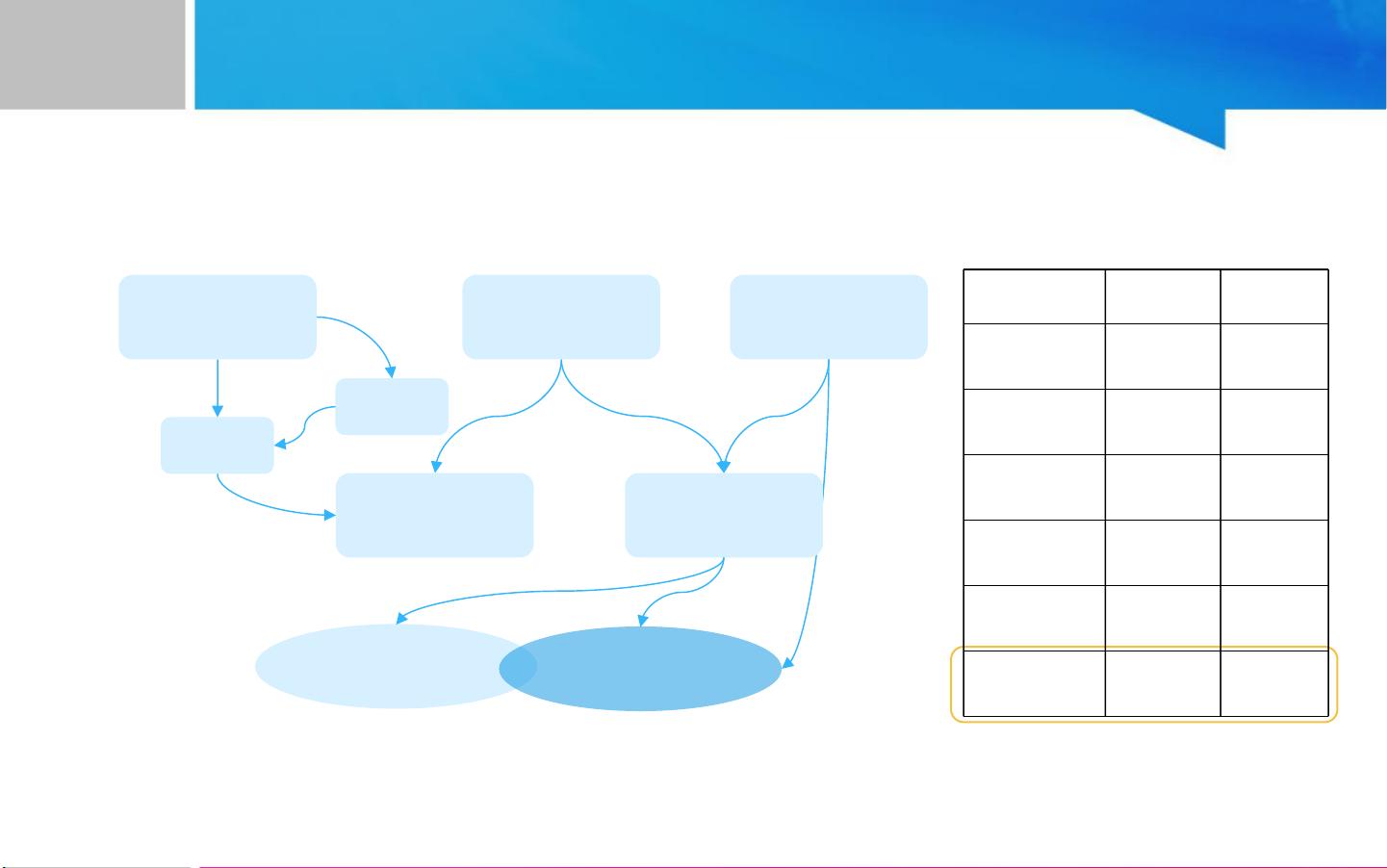
关联Relationship
关联图(部分)
参考文献:https://blog.robotiq.com/
技术类别
输入
输出
信号处理
电信号
电信号
图像处理
图像
图像
计算机视觉
图像
信息/特征
机器学习
信息/特征
信息
机器视觉
图像
信息
机器人视觉
图像
物理行动
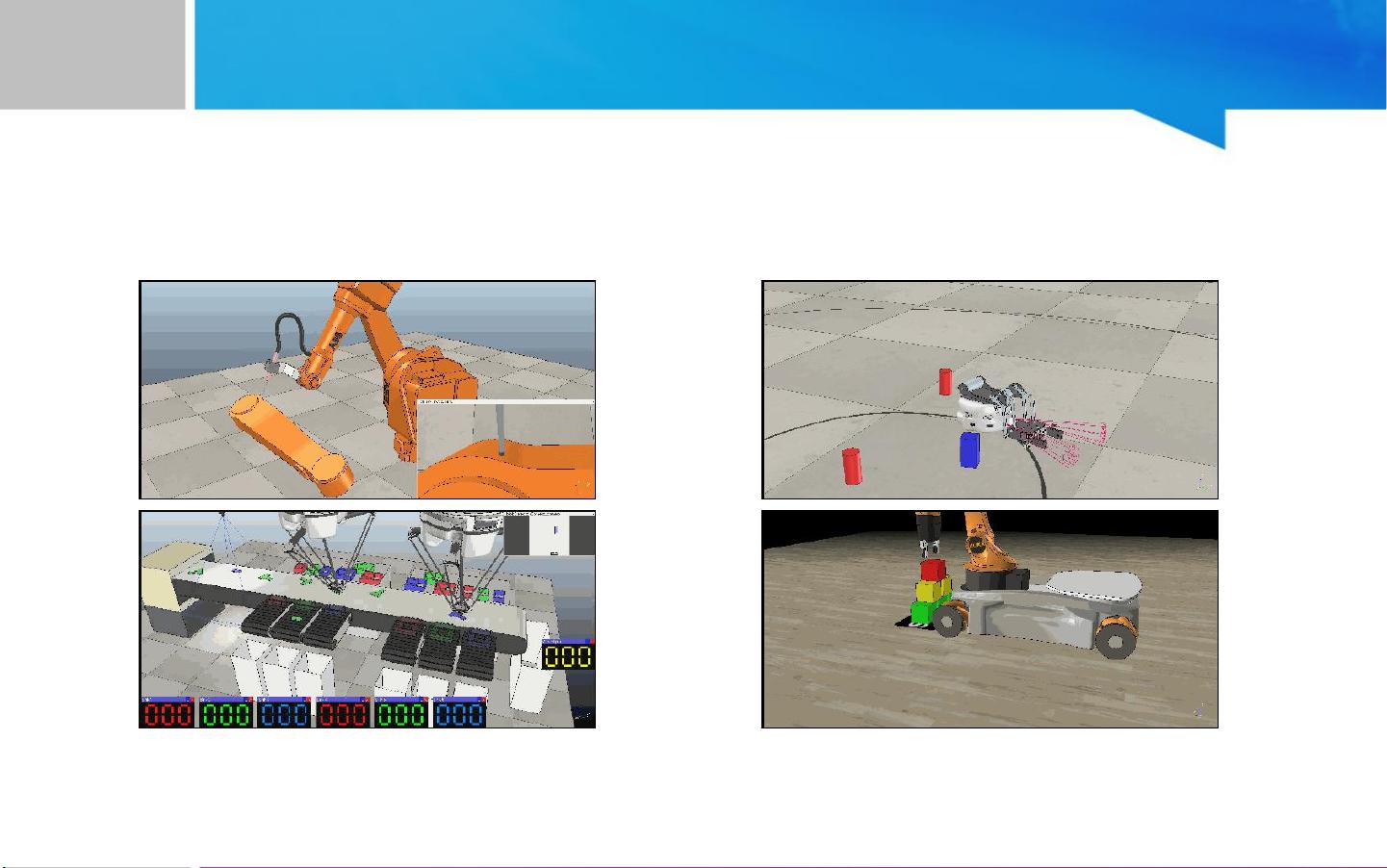
机器视觉
机器人视觉
物理学
光学
电学
信号处理 机器学习
图像处理 计算机视觉
2018年ROS暑期学校(7.21-7.28)
zhangrelay
剩余25页未读,继续阅读

六六木木
- 粉丝: 23
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


