

10.12 边界
注意如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字段
会被禁用(详见 10.12和10.13)。
每个限制的公差和单位列于对应的行末。第一个公差值应用于最小值,第二个公差
值应用于最大值。由于将第一个公差与输入的最小值相加,以及将第二个公差值与
输入的最大值相减,而导致关节位置即将超过此范围时,如果继续沿预测的轨迹移
动,程序将中止执行。请注意,公差值所示的负号只是用于表明要从实际输入的值
中减去公差。但是,如果关节位置超过输入的范围,安全系统将实施 0 类停机。
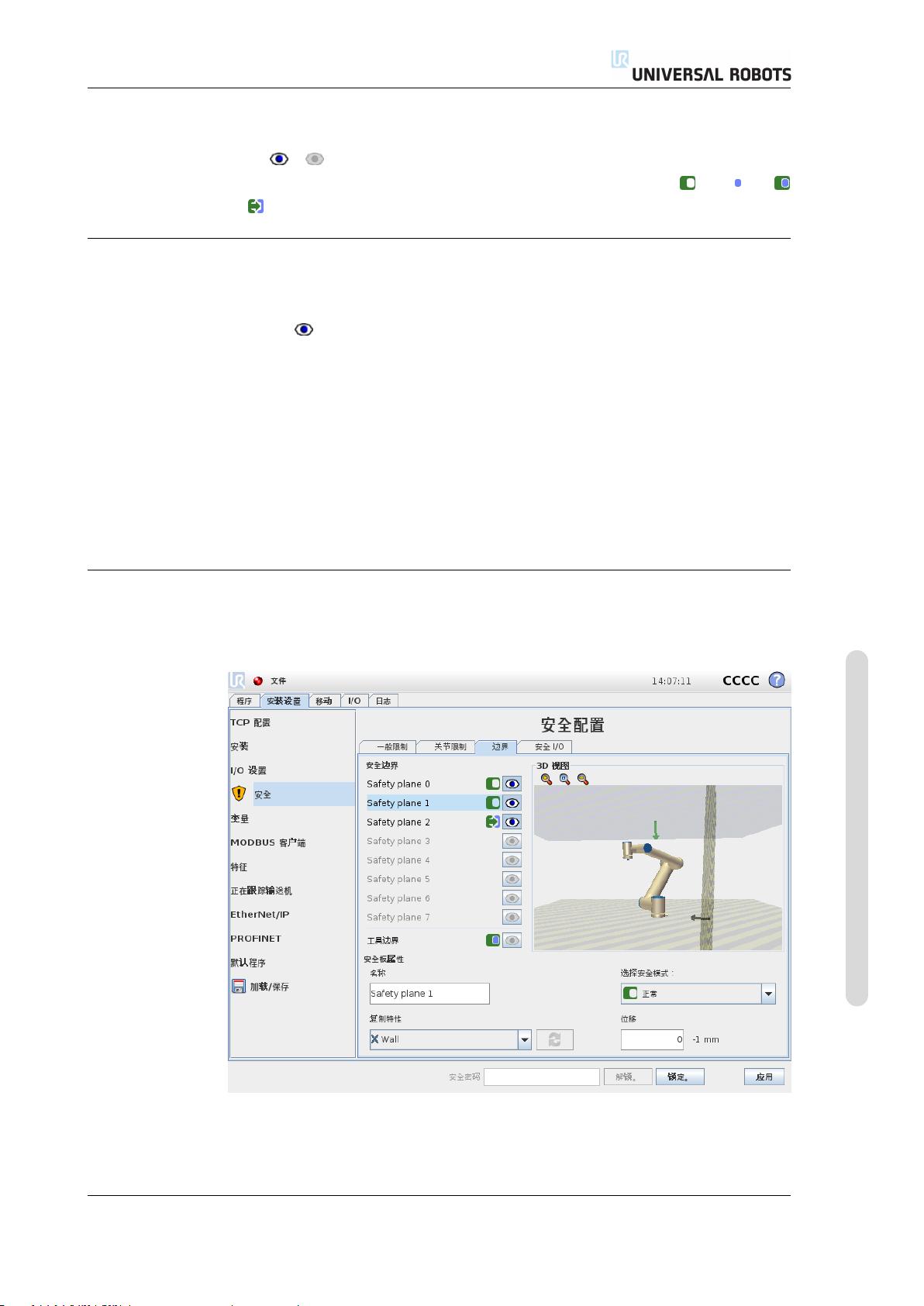
10.12 边界
你可以在该选项卡中对边界限制进行配置。边界限制由安全板及机器人工具方向的
最大允许偏离限制组成。还可以定义用于触发转化为缩减模式的平面。
强制使机器人 TCP 保持在被定义的板子的正确的一边,而不超过这些板子,通过
这一方法,安全板可用于限制机器人的允许工作空间。最多可配置 8 块安全板。工
具方向的限制可用于确保机器人工具方向与理想的方向的偏差不超过某一指定的数
量。
警告:
定义安全平面只限制 TCP,对机器人手臂的整体限制无影响。这
意味着虽然指定了安全平面,但并不保证机器人手臂的其他部分也
遵循该限制。
每一个边界限制都是根据当前机器人安装定义的属性之一进行配置的 (请 参
阅 13.12)。
注意:
强烈建议在编辑安全配置前,先创建配置所需的所有边界限制的所
有特征,并为其指定适当的名称。请注意,由于安全选项卡解锁后
将切断机器人手臂的电源,因此工具特征(包含机器人 TCP 的当
前位置和方向)以及自由驱动模式(参见 13.1.5)将不可用。
当机器人 TCP 处于 自由驱动模式时(请参阅 13.1.5),其当前位置接近安全板,或
者机器人的方向与理想的方向之间的偏差接近某一指定的最大偏离值,那么随着
TCP 越来越接近该极限,用户会感受到一股不断增加的排斥力。这股力量在 TCP
位于安全板大约 5 厘米时产生,或者在工具方向的偏离值与指定的最大偏离值相差
大约 3
◦
时产生。
当一个平面被定义为触发器缩减模式平面,并且 TCP 超出此边界,安全系统将转
换为缩减模式,并应用缩减模式的安全设置。触发板与一般的安全板所遵循的规则
是相同的,只不过一般的安全板允许机器人手臂超出板子。
10.12.1 选择一个边界进行配置
安全边界控件位于选项卡左边,它是用来选择一个边界限制进行配置的。
按下控件中列出的 8 个条目之一就可对安全板进行设置。如果所选的安全平面已进
行配置,此平面相应的 3D 展示将在此面板右侧的 3D 视图(请参阅 10.12.2)中突
出显示。可在选项卡底部安全板属性这一部分对安全板进行设置(请参阅 10.12.3)。
CB3 II-10 版本 3.3.0..
版权所有 © 2009–2016 Universal Robots A/S. 保留所有权利。

剩余102页未读,继续阅读

走过你的时光了
- 粉丝: 17
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


