灭火机器人:智能寻火与避障技术解析
182 浏览量
更新于2024-09-04
收藏 452KB PDF 举报
"灭火机器人控制技术研究主要涉及了灭火机器人的设计、硬件配置以及控制算法。该机器人采用STC80C52单片机作为核心控制器,配备步进电机和温度传感器来定位火源,红外测距传感器与直流电机用于行走和避障。控制策略上,结合‘左右手定则’和‘无火不入房’的原则,优化了火源搜索效率。硬件部分包括驱动模块、传感器模块、灭火模块和电源模块,其中驱动模块由直流电机驱动和步进电机驱动组成,确保机器人的灵活移动和火源定位。"
本文详细介绍了基于STC80C52单片机的灭火机器人设计,旨在解决比赛中快速准确找到并熄灭火源的问题。STC80C52是一款8位微处理器,具有较高的处理能力,适用于这种复杂控制任务。机器人通过步进电机转动温度传感器来检测火源,步进电机以其精确的定位能力在火源探测中起着关键作用。红外测距传感器则辅助机器人避开障碍物,直流电机驱动机器人行走,两者结合实现了自主导航。
在控制算法上,"左右手定则"是一种路径规划策略,使得机器人在未知环境中能有效地搜索火源,而"无火不入房"策略则是确保机器人只会在检测到火源时才进入房间,避免无效行动,有效提升了灭火效率。这一策略结合了实际应用场景,体现了智能决策的特性。
硬件设计部分,机器人采用L298N双H桥直流电机驱动芯片控制直流电机,该芯片可提供宽电压范围,兼容单片机工作电压,能灵活控制机器人的运动。步进电机驱动部分,选用了A3955SB芯片,它具备高电压、大电流驱动能力,并有多种保护机制,增强了系统的稳定性和安全性。
此外,机器人还包括传感器模块,用于获取环境信息,例如火焰传感器用于火源定位;灭火模块负责执行灭火操作,可能包括强力风扇或其他设备;电源模块为整个系统提供能量,确保各组件正常运行。
这项研究展示了灭火机器人如何通过巧妙的硬件设计和智能控制策略实现高效、精准的灭火任务,为未来智能消防系统的发展提供了有价值的技术参考。
灭火机器人控制技术研究灭火机器人控制技术研究
介绍了一种自行研发与制作的比赛用灭火机器人。该机器人采用STC80C52单片机为主控芯片,结合使用步进
电机和温度传感器来判断火源位置,利用红外测距传感器与直流电机完成机器人的行走和自动避障等功能。在
控制算法上,采用“左右手定则”和无火不入房的策略,提高了寻找火源的效率。
摘摘 要要: 介绍了一种自行研发与制作的比赛用
关键词 关键词: 灭火机器人;STC80C52;红外测距传感器
随着机器人技术的飞速发展,工业机器人已广泛应用于各个领域的工业现场,成为了先进制造技术和
1 总体设计思想总体设计思想
通过对比赛规则的分析(用蜡烛模拟火源,随机分布在场地中,要求在最短的时间内找到火源并将其扑灭),为在最短的
时间内完成比赛所规定的任务,对机器人完成整个动作要求做如下设计:机器人在直流电机的驱动下完成前后及转弯等动作;
在运动的过程中利用红外传感器和循迹模块实现自动避障和房间定位功能;当机器人定位火源的房间后,由直流电机和循迹模
块共同工作,驱动机器人运动至灭火位置,随后通过驱动强力风扇实现灭火任务;灭火完成后返回出发区域。
2 硬件及电路设计硬件及电路设计
机器人的控制芯片采用MCS-51系列的80C52单片机,它内置8位中央处理单元,32个双向输入输出口,是80C51的增强
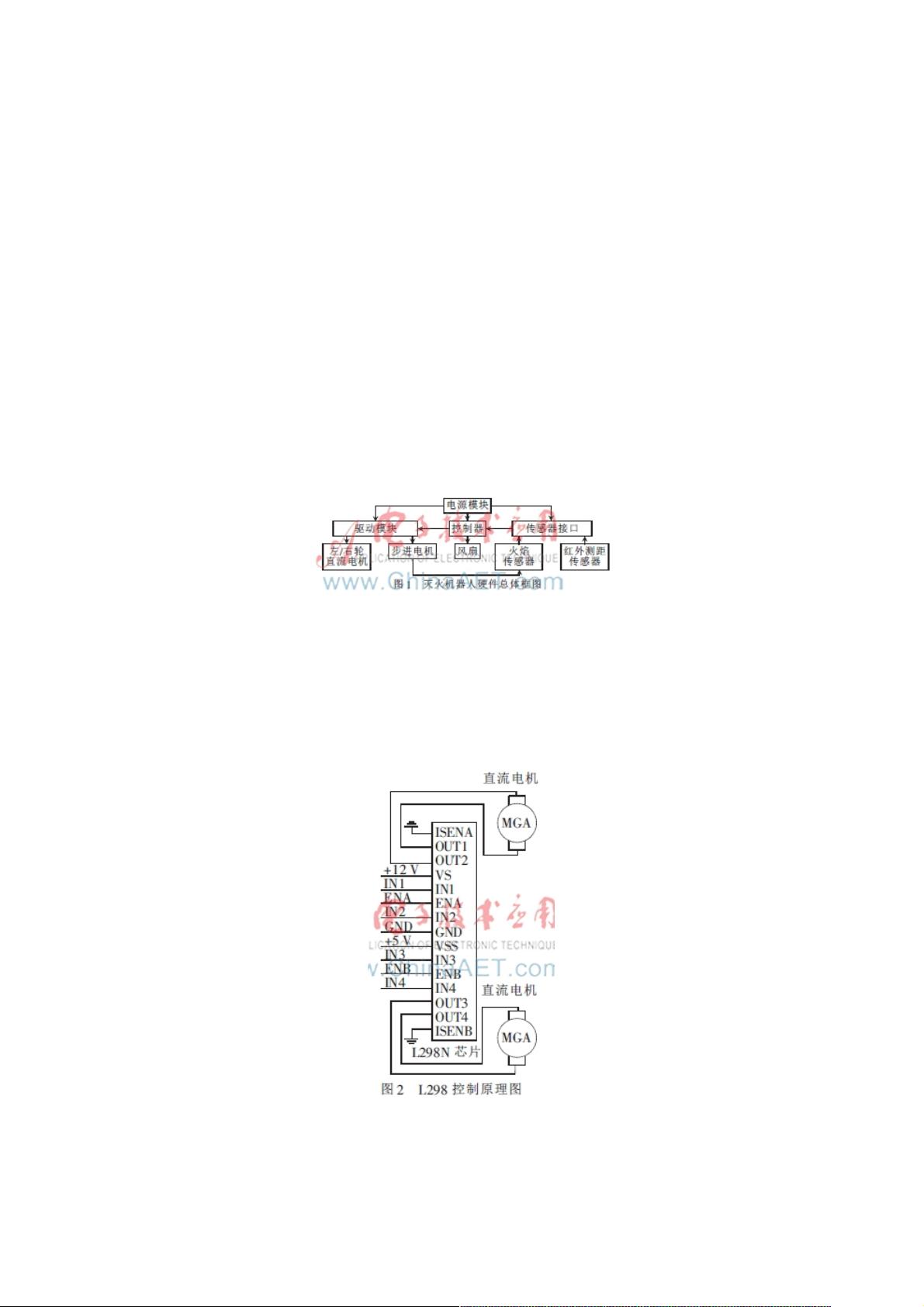
版本,工作电压为3.3 V~5 V[2]。机器人硬件部分主要包括驱动模块、传感器模块、灭火模块和电源模块,总体框图如图1所
示。
2.1 驱动模块
驱动模块主要包括直流电机驱动和步进电机驱动两部分。
直流电机驱动模块[3]主要用于控制直流电机运动,完成机器人向前向后及转弯等功能。控制芯片采用L298N双H桥直流电
机驱动芯片,其逻辑供电电压为5 V,与单片机工作电压相匹配,驱动供电电压为5 V~46 V,在此采用12 V的电压输入。控制
原理图如图2所示,其中VS和VSS分别为驱动控制电压和逻辑控制电压,ENA、ENB分别为直流电机1、2的使能端,OUT1、
OUT2、OUT3、OUT4输出PWM方波控制直流电机1、2的转速。
步进电机驱动主要用于带动火焰传感器旋转进行火焰的定位。控制芯片采用A3955SB,该芯片是美国Allegro公司生产
的,其工作电压可达50 V,电流可达1.5 A。同时A3955SB芯片还提供过温保护、过流保护及欠压保护等功能[4]。A3955SB芯
片为16引脚的芯片,其输入为DAC的3个输入端D0、D1、D2,通过设置REF端口的电压和采样电阻R0,可确定通过步进电机
的最大电流Imax,其关系式为Imax=VREF/3R0;RC端口用来控制PWM的波形;输出为OUTA和OUTB,用于控制步进电机
的某一相,同时PHASE端口决定步进脉冲的方向。两相步进电机的控制电路图如图3所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2019-09-05 上传
2019-10-30 上传
2023-12-10 上传
2023-05-22 上传
2023-05-20 上传
2023-05-13 上传
2023-05-30 上传
2023-09-18 上传
2023-05-30 上传

weixin_38551070
- 粉丝: 3
- 资源: 900
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
