双臂空间机器人自由漂浮惯性轨迹非线性控制策略验证
需积分: 10 47 浏览量
更新于2024-08-08
收藏 225KB PDF 举报
本文主要探讨了2007年发表在《集美大学学报(自然科学版)》上的"双臂空间机器人惯性空间轨迹的非线性反馈跟踪控制"这一主题。作者葛景华、陈力和郭益深针对的是一个特殊的自由漂浮双臂空间机器人系统,其特点是载体的姿态和位置都不受控制。这种系统在未来的航天活动中具有重要意义,尤其是在大型空间站的组装和维护任务中,因为双臂机器人相较于单臂机器人拥有更大的负载能力和更好的稳定性,能执行单臂机器人难以完成的工作。
论文首先从系统的动量和动量矩守恒出发,利用系统的Jacobian矩阵分析了机械臂末端抓手的加速度与关节角速度和角加速度之间的关系。接着,作者采用Roberson-Wittenburg方法来推导出系统动力学方程,这是控制设计的基础。在这个基础上,他们设计了一种非线性反馈跟踪控制策略,目标是使机械臂末端抓手在惯性空间内精确地跟随预设的轨迹。
非线性反馈控制是一种先进的控制策略,它能够处理系统动态特性中的非线性因素,确保在复杂的运动环境中保持高精度和鲁棒性。通过仿真结果,作者验证了这种控制方法的有效性,证明了即使在不受控的载体条件下,双臂空间机器人也能实现精确的轨迹跟踪,这对于减少燃料消耗、提高机械臂使用寿命和降低发射成本具有实际应用价值。
这篇论文深入研究了双臂空间机器人的运动学和动力学特性,提出了一个有效的控制框架,对于推动空间机器人技术的发展,特别是在资源有限的太空环境中,具有重要的科学和技术贡献。
第
12
卷第
3
期
2007
年
7
月
集美大学学报(自然科学版)
Joumal of Jimei University( Natural Science)
[文章编号]
1
∞
7
-7405(2
∞
7)03
-0232
-05
Vo
l.
12
No.3
Jul.
2
∞
7
双臂空间机器人惯性空间轨迹的非线性反馈跟踪控制
葛景华陈力
2
郭益深
2
(1.集美大学轮机工程学院,福建厦门
361021;
2.
福州大学机械工程及自动化学院,福建福州
350
∞
2)
[摘要]讨论了载体姿态及位置均不受控制的自由漂浮双臂空间机器人系统的轨迹控制问题.首先,
根据双臂空间机器人系统的动量、动量矩守恒关系及系统的
Jacobian
矩阵,得出机械臂末端抓手加速度与
关节角速度、角加速度的关系.然后,根据
Roberson-
Wittenburg
方法推导出系统动力学方程.以此为基础,
设计了自由漂浮双臂空间机器人系统机械臂末端抓手惯性空间轨迹的非线性反馈跟踪控制方案.仿真结果
证明了上述控制方法的有效性.
[关键词]双臂空间机器人
Roberson-Wi
阳出
urg
方法;非线性反馈控制
[中图分类号]霄
242
[文献标识码]
A
0
引言
空间机器人将在未来航天活动中发挥重要作用,并被期望承担大型空间站的在轨组装及无人状态
下空间站的日常维修及试验操作任务.有许多文献对空间机器人的控制进行了研究
[1-8]
但是,这些
研究都是针对空间单臂机器人系统.空间双臂机器人与空间单臂机器人相比,具有负载能力大及较好
的稳定性等优点,而且空间双臂机器人能够完成一些空间单臂机器人无法完成的任务.又由于在空间
环境下系统控制燃料极其宝贵,从节省控制燃料、增加空间机械臂的有效使用寿命、减少发射费用等
角度考虑,使用载体位置、姿态均不受控制的空间机械臂将非常有必要.因此,研究载体姿态、位置
均不受控制的双臂空间机器人的控制问题有着重要的
e(.!).
实际意义.
1
系统运动学与动力学
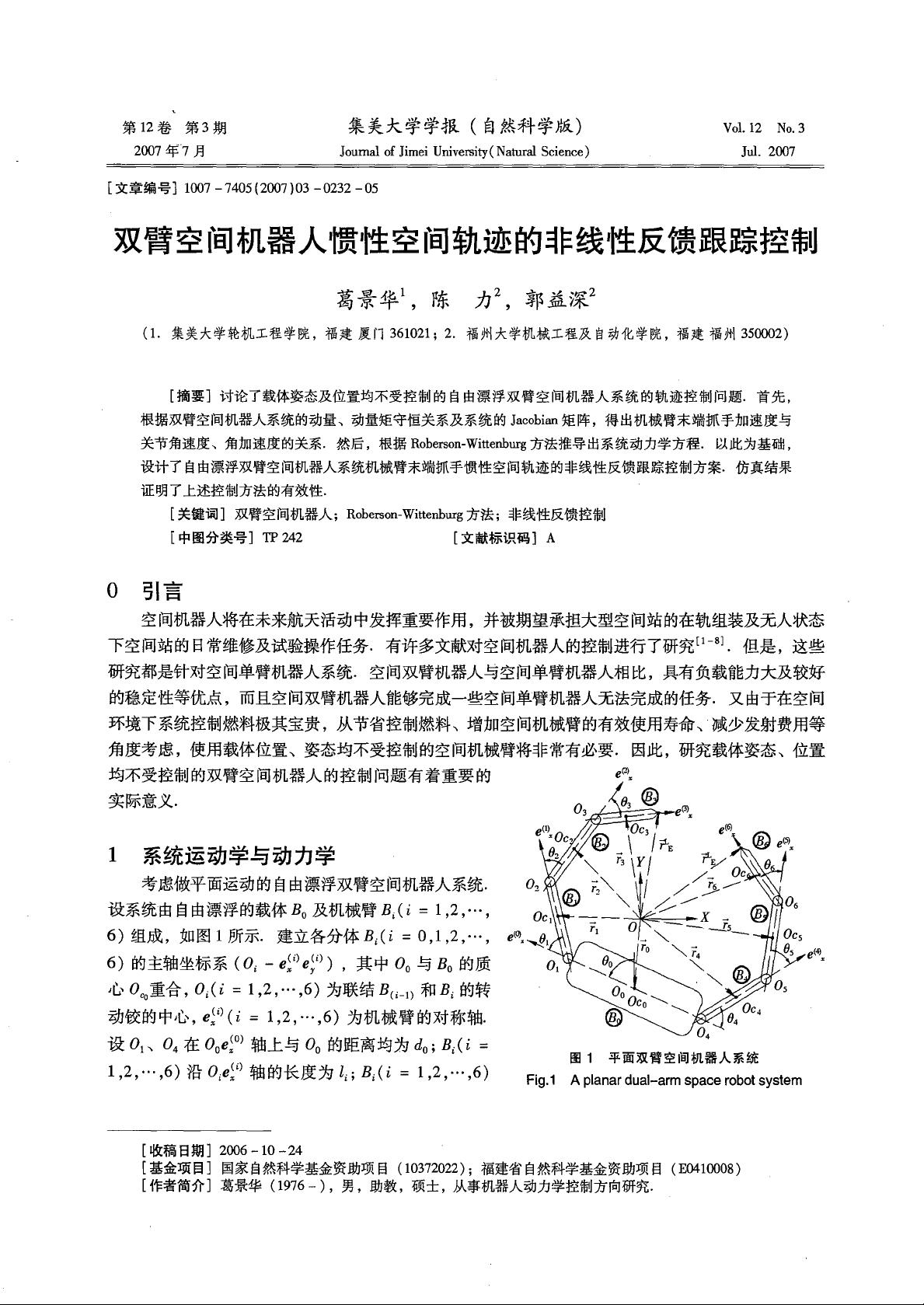
考虑做平面运动的自由漂浮双臂空间机器人系统.
设系统由自由漂浮的载体
Bo
及机械臂
B
,
(i
= 1,2
,…,
6)
组成,如图
1
所示.建立各分体
B
,
(i
=0
,1 ,2 ,
…,
6)
的主轴坐标系
(Oz-d)e;t))
,其中
0
。与
Bo
的质
心。句重合
,
O
,(i
=
1
,
2
,…,
6)
为联结
B
(i_l)
和
B
,
的转
动钱的中心,
ef)(i=1
,
1
…,
6)
为机械臂的对称轴.
设
0
1
、
0
4
在
OoejO)
轴上与
0
。的距离均为
d
o
;
B
,(
i
=
LL·-16)
沿
Ozef)
轴的长度为
l
,;
B
,
(i
=
1
,
2
,"',
6)
[收稿日期]
2
∞
6-10-24
图
1
平面双臂空间机器人系统
Fig.1
A
planar
dual-arm space robot system
[基金项目]国家自然科学基金资助项目(1
0372022)
;福建省自然科学基金资助项目(四
41
∞
08)
[作者简介]葛景华
(1976
斗,男,助教,硕士,从事机器人动力学控制方向研究.
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-21 上传
2021-08-12 上传
2021-08-12 上传
点击了解资源详情
点击了解资源详情
2021-09-21 上传
2021-09-21 上传
2021-05-14 上传

weixin_38590775
- 粉丝: 2
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- Notebook 基础知识
- JMAIL源码 电子邮件系统 带附件
- Addison.Wesley.xUnit.Test.Patterns.Refactoring.Test.Code.May.2007.pdf
- 3D游戏程序设计入门DirectX9
- 一个树行菜单共享文件
- asp .net完全入门教程 pdf
- 06-07年程序员考试题(1)答案?
- 06-07年程序员考试题(1)答案???
- J-Link用户手册最新版
- linuxas3.0-oracle9204
- 开始嵌入式的学习生涯(触摸屏)
- Allegro 中关于XNet 的等长设置.pdf
- 英文资料日本东芝编写的NAND FLASH与 NOR FLASH的对比
- java面试题及答案(基础题122道, 19道)
- 51MCS——汇编.pdf
- powershell红皮书
