模糊神经网络融合技术在移动机器人导航中的应用
需积分: 10 102 浏览量
更新于2024-09-17
收藏 326KB PDF 举报
"本文介绍了模糊神经网络在移动机器人导航中的应用,通过信息融合技术处理来自超声波、红外传感器和CCD摄像机的数据,实现机器人对障碍物和环境的识别及安全避障。"
模糊神经网络是一种结合了模糊逻辑和神经网络的智能计算模型,它在处理不确定性和复杂性问题时具有优势。在移动机器人导航领域,这种网络可以用于融合来自不同传感器的信息,以提高决策的准确性和鲁棒性。本文提出的多传感器信息融合算法基于模糊神经网络,旨在优化和整合来自多个信息源的数据。
在移动机器人导航系统中,传感器起着至关重要的作用。超声波传感器和红外传感器用于探测周围环境中障碍物的距离和方向,提供实时的感知数据。这些传感器的数据可能存在噪声、不精确或不完整,但通过模糊神经网络的信息融合,可以降低这些不确定性,提高障碍物检测的可靠性。此外,CCD摄像机用于跟踪目标,为机器人提供视觉信息,帮助识别动态环境中的目标物体。
模糊神经网络的信息融合过程包括以下几个步骤:
1. 数据预处理:首先,从传感器收集的数据需要进行预处理,去除噪声和异常值,使得输入数据适合神经网络的处理。
2. 模糊化:将预处理后的数据转换成模糊集的概念,通过定义模糊隶属函数来描述数据的不确定性和模糊性。
3. 网络训练:利用学习算法(如BP算法、径向基函数等)训练模糊神经网络,使其能够学习和适应环境变化。
4. 规则推理:基于模糊规则库进行推理,将不同传感器的数据融合,得出更精确的障碍物位置和状态。
5. 模糊决策:通过模糊决策过程,机器人确定其行动策略,如避开障碍物、跟踪目标或改变路径。
6. 反模糊化:最后,将模糊决策结果转化为明确的控制指令,驱动机器人执行相应的动作。
实验结果表明,应用模糊神经网络进行信息融合的移动机器人导航系统能有效识别不同类型和动态的障碍物,避免碰撞,并能在复杂环境中做出合理的路径规划。这种方法增强了机器人的自主性和适应性,对于实现高级的自主导航任务具有重要意义。同时,由于模糊神经网络的自学习和自适应能力,该方法也能应对环境变化,保持系统的稳定性和可靠性。因此,模糊神经网络在移动机器人导航中的应用具有广阔的研究前景和实际应用价值。
2009年7月
第37卷第7期
机床与液压
MACHINE TOOL&HYDRAUUCS
Jul.2009
V01.37
No.7
DOI:10.3969/j.issn.1001—3881.2009.07.051
模糊神经网络信息融合在移动机器人导航中的应用
姜志兵
(南京工业大学管理科学与工程学院,江苏南京210009)
摘要:提出一种基于模糊神经网络的多传感器信息融合方法,并将其用于自主移动机器人导航避障。采用多个超声波
及红外传感器探测障碍物的距离和方向,用CCD摄像机来跟踪目标。经过模糊神经网络信息融合后,实现了机器人对障碍
物和环境类型的识别以及无冲突的运动。试验表明,该方法能够实现机器人的安全避障。
关键词:模糊神经网络;信息融合;移动机器人;导航
中圈分类号:TPl83
文献标识码:B
文章编号:1001—3881(2009)7—154—3
Application
of
Information
Fusion
Based
on
Fuzzy
Neural
Networks
in
the
Mobile
Robot
Navigation
JIANG
Zhibing
(College
of
Automation。Nanjing
University
of
Technology,Nanjing
Jiangsu
210009,China)
Abstract:A
multi·8el'lsor
information
fusion副tgorithm
based
on
fuzzy
neural
networks
WM
presented。and
it懈used
for
the
oh-
stacle
avoidance.
Several
ultrasonic
sensors
and
infrared
sensom
were
used
to
detect
the
distance
and the
direction
of
the
obstacle,and
CCD
video
camera
was
used
to
foUow
the
target.The
mobile
robot
earl
recognize
movin8
obstacles
and
environment
types。and
Can
de-
cide its
action
by
using
the
information
fusion
method
put
forward,80
the
movement
without
collision
WM
realized
in
dynamic
environ-
merit.The
experiment
indicates
that
the
method
is
practicable
and
effective
for
the
mobile
robot to
avoid
the
obstacle.
Keywords:Fuzzy
neural
networks;Information
fusion;Mobile
robot;Navigation
随着移动机器人应用的日益广泛。对移动机器人
的智能要求也越来越高。多传感器的信息融合正成为
提高移动机器人智能的关键技术。在移动机器人中常
用的传感器有超声波测距传感器、CCD摄像机、红
外传感器、激光传感器、GPS等…。作者采用了CCD
摄像机、多个超声波测距传感器和红外传感器。依据
推理方法不同,多传感器信息融合主要有贝叶斯估
计、卡尔曼滤波、D-S证据推理、模糊推理和神经网
络等方法‘21。
神经网络技术与模糊技术各有自己的优点,二者
有机结合,可有效发挥各自的优势并弥补不足。神经
网络在学习和自动模式识别方面有极强的优势,采取
神经网络技术来进行模糊信息处理,则使得模糊规则
的自动提取及模糊隶属函数的自动生成有可能得以解
决。因此,作者采用一种基于模糊神经网络的融合方
法,该方法不依赖于系统的精确数学模型且适用于复
杂的系统和过程。
1
模糊神经网络结构
为了使移动机器人能躲避物体,传感器必须能够
获得障碍物的以下参数:形状、距离、方位以及环境
信息。将这些信息通过模糊神经网络融合p。。
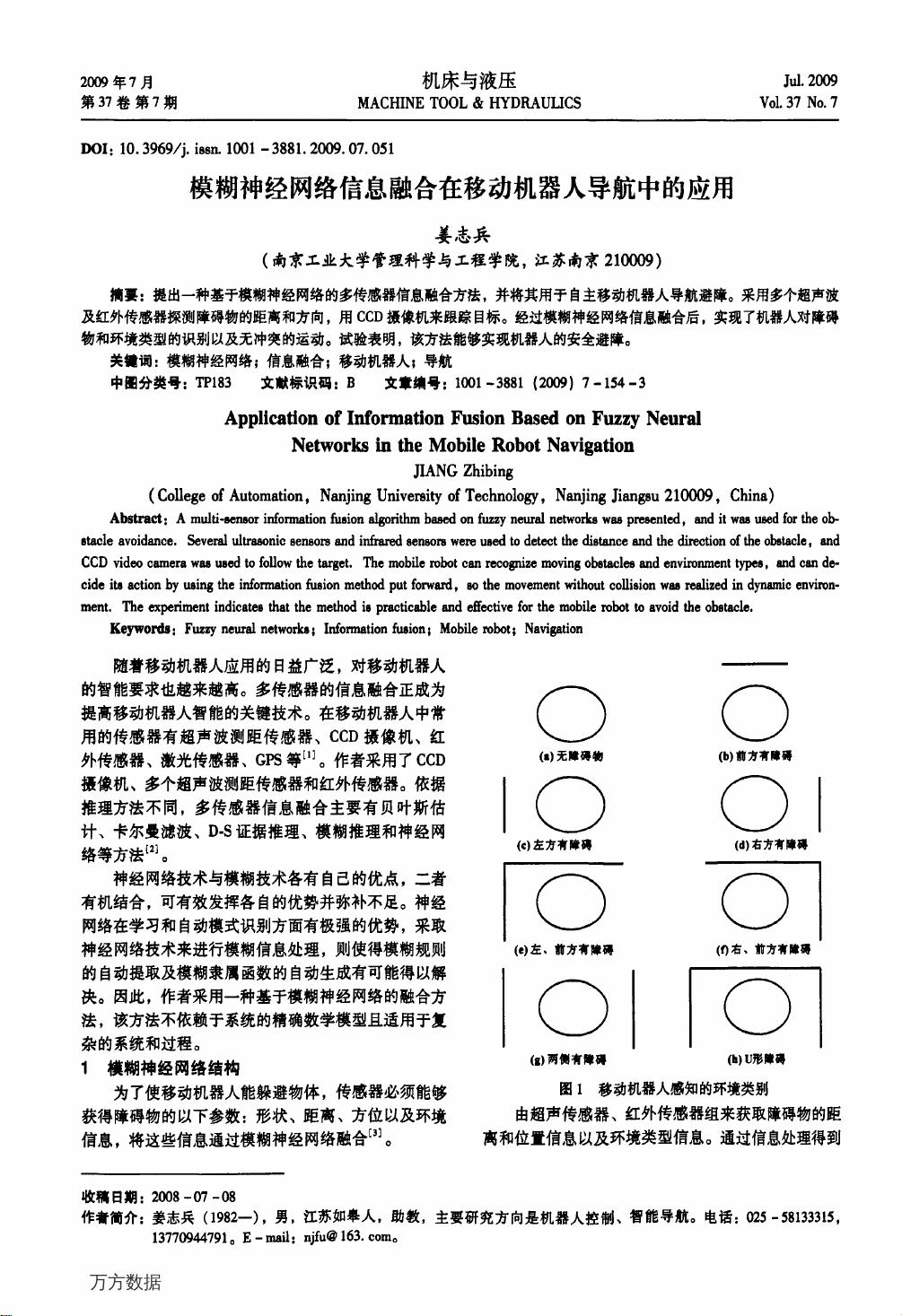
‘c)左方有障碍
《d)右方有障碍
(e)左、前方有障碍
(f)右,前方有障碍
o
(g)两倔有障碍
(h)U形障碍
图1
移动机器人感知的环境类别
由超声传感器、红外传感器组来获取障碍物的距
离和位置信息以及环境类型信息。通过信息处理得到
收稿日期:2008—07—08
作者简介:姜志兵(1982一),男,江苏如皋人,助教,主要研究方向是机器人控制、智能导航。电话:025—58133315,
13770944791。E—mail:njfu@163.eom。
石芍
Q
o
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
2023-07-23 上传
2023-06-06 上传
2023-05-22 上传
2023-11-12 上传
2023-04-01 上传
2023-12-15 上传
2023-05-27 上传
2023-10-19 上传

wxf19890102
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
