Pix4Dmapper全攻略:作业流程、问题解决与参数设置
Pix4Dmapper是一款专业的无人机航拍后处理软件,用于创建高精度的三维模型和正射影像。本教程详细介绍了Pix4Dmapper的工作流程及其常见问题解决方案,帮助用户高效地进行数据处理。
**1. 作业流程图**
作业流程主要包括以下几个步骤:
- **原始资料准备**:收集影像数据(如.jpg或.DNG),POS数据(包含相片信息和姿态数据)、相机配置文件和控制点数据。确保所有数据完整且质量良好。
- **建立工程并导入数据**:
- **新建工程**:启动Pix4Dmapper,创建新的航拍项目,设置工程属性(例如名称、路径,排除非航拍和倾斜项目)。
- **加入影像**:导入航拍照片,确保路径正确且无中文字符。
- **设置影像属性**:配置影像的坐标系(默认WGS84),以及可能需要调整的其他图像设置。
- **加入控制点**:有三种方式插入控制点:
- 使用像控点编辑器
- 在空三射线编辑器中手动标记
- 利用预测控制点功能
- **全自动处理**:包括初始化设置、点云加密、生成数字表面模型和正射影像。
- **质量报告分析**:检查空三误差、相机校准误差和控制点误差,评估结果。
- **编辑与输出**:对点云和正射影像进行后期编辑,以便于最终输出。
**2. 常见问题及解决方案**
- **低精度快拼影像**:可能是因为相机参数设置不准确或数据质量问题,检查并调整相机参数。
- **多个工程融合**:在处理多项目时,可能需要合并现有项目,确保项目文件结构清晰。
- **区域输出成果**:根据需求选择合适的输出范围,可能涉及地理区域设置。
- **项目路径文件结构**:避免中文字符在路径中,保持路径简单易读。
通过这个详细的指南,用户可以掌握如何使用Pix4Dmapper进行高效、精确的无人机航拍数据分析,解决实际操作中遇到的问题,提升工作流程的效率。无论是初级用户还是经验丰富的专业人士,都能从中找到所需的信息。
中海达 Pix4Dmapper 作业手册
4 快速处理检查(可选)
快速处理出来的结果精度比较低,所以快速处理的速度会快很多。因此快速处理建议
在飞行现场进行,发现问题方便及时处理。如果快速处理失败了,那么后续的操作也可能
出现相同结果,即使后续处理成功,得到的成果精度也不高。
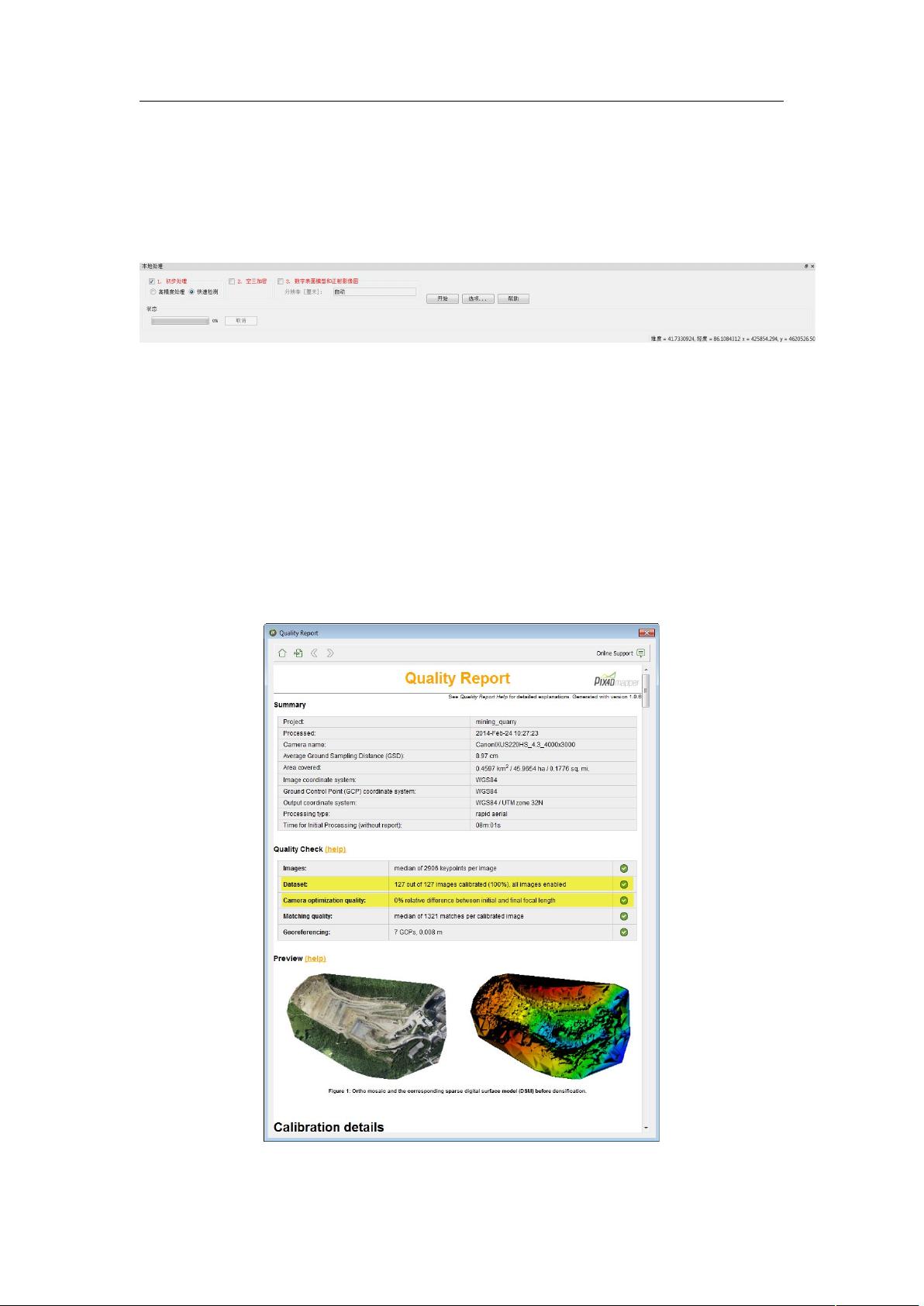
点运行,选择本地处理。设置如下图,初步处理和快速检测选上,其他不选,点开始,
等待软件运行完,可以查看快速处理得到的成果(一张的影像拼图),检查快速处理质量
报告。
质量报告主要检查两个问题,Dataset 以及 Camera optimization quality。
Dataset(数据集):在快速处理过程中所有的影像都会进行匹配,这里我们需要确定大
部分或者所有的影像都进行了匹配。如果没有就表明飞行时相片间的重叠度不够或者
相片质量太差。
Camera optimization quality(相机参数优化质量):最初的相机焦距和计算得到的相机
焦距相差不能超过 5%,不然就是最初选择的相机模型有误,重新设置。
5
剩余22页未读,继续阅读
6358 浏览量
2548 浏览量
333 浏览量
1342 浏览量
557 浏览量
2701 浏览量

zhao11234
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 嵌入式系统综述 pdf文件 讲解了软件和硬件,以及开发
- VLAN在校园网中的应用方案设计
- C++设计模式.pdf (C++ 详细描述经典设计模式)
- 计算机一级网上测试系统
- 搭建SVN使用说明及原理说明
- VC编程资料\网络编程实用教程_相关章节实例源程序清单.doc
- sqlsever 2005 操作数据库
- redhat linux手册
- Office SharePoint Server 2007 Install Guide.pdf
- asp.net,php等web开发教程
- Keil C51 vs 标准C
- 挑战SOC-基于NIOS的SOPC设计于实践
- VC++ 6.0 - Advanced MFC Programming
- C++风格的C经典程序
- PLL锁相环的ADS仿真
- delphi6database编程
