CC2431定位引擎技术详解
需积分: 9 51 浏览量
更新于2024-07-28
收藏 289KB PDF 举报
"本文档详细介绍了CC2431芯片的定位引擎原理,该芯片是Zigbee系统级芯片,适合在Zigbee网络中应用定位功能。文档旨在提供定位技术的基本方面,并给出使用CC2431定位引擎进行系统开发的一些提示和建议。它作为CC2431和CC2430数据手册的补充,涵盖定位引擎的工作原理、节点类型、硬件组成、接收信号强度指示(RSSI)及其实际应用考虑因素。"
CC2431定位原理主要涉及以下几个方面:
1. **节点类型**:
- **参考节点**:在定位系统中起到基准作用的节点,通常具有已知的位置信息,用于与盲节点进行通信并计算后者的位置。
- **盲节点**:待定位的节点,它们没有预知的位置信息,通过与参考节点之间的通信来确定自己的位置。
2. **定位硬件**:
- **输入**:硬件包括接收器,用于捕获来自参考节点的信号。这些信号包含了距离估计所需的信息,如信号强度。
- **输出**:可能包含处理后的定位数据,例如计算出的坐标信息,可以供上层应用使用。
3. **接收信号强度指示(RSSI)**:
- **OFFSET**:RSSI值通常需要校准,因为它会受到硬件和环境的影响,存在一个固定的偏移量。
- **LINEARITY**:RSSI与信号传播距离的关系可能非线性,因此在处理RSSI数据时需要考虑这种非线性特性。
- **理论信号传播**:理想情况下,信号强度随距离的平方成反比衰减,但实际情况中要考虑多路径效应、障碍物阻挡等因素。
- **实际考虑**:RSSI的测量可能受到多种因素影响,如天线增益、环境噪声、温度等,需要在实际应用中进行调整和补偿。
4. **应用开发提示**:
- 开发系统时,需要考虑如何有效地布置参考节点以获取准确的信号强度信息。
- 为了提高定位精度,可能需要采用多种定位算法,如多路径RSSI平均、三角定位等。
- 考虑到无线信号的不稳定性,可能需要引入时间同步机制,确保不同节点在同一时间进行测量。
- 实际应用中,可能需要定期校准RSSI以保持其准确性。
CC2431的定位原理基于Zigbee通信网络,通过参考节点和盲节点的相互作用,结合RSSI信息计算节点位置。实现定位功能时,需理解硬件特性,处理RSSI数据,并考虑实际环境中的干扰因素。开发者应根据这些原理和提示,设计和优化定位系统以满足具体应用需求。
Application Note
AN042
3.1 Node types
3.1.1 Reference node
A node which has a static location is called a reference node. This node must be configured
with X and Y value that correspond to the physical location.
The main task for a reference node is to provide a “reference” packet that contains X and Y
coordinates to the blind node, also referred to as an anchor node.
Since this node is not using the hardware location engine at all, it is not necessary to use a
CC2431 for the purpose. This means that a reference node can be run on either a CC2430 or
a CC2431. Since CC2430/31 is based on the same transceiver as CC2420, even a CC2420
together with a suitable microcontroller can be used as reference node.
3.1.2 Blind Node
A blind node will communicate with the closest reference nodes, collecting X, Y and RSSI for
each of these nodes, and calculate its position based on the parameter input using the
location engine hardware. Afterwards the calculated position should be sent to a control
station. This control station could be a PC or another node in the system.
A blind node must be using CC2431.
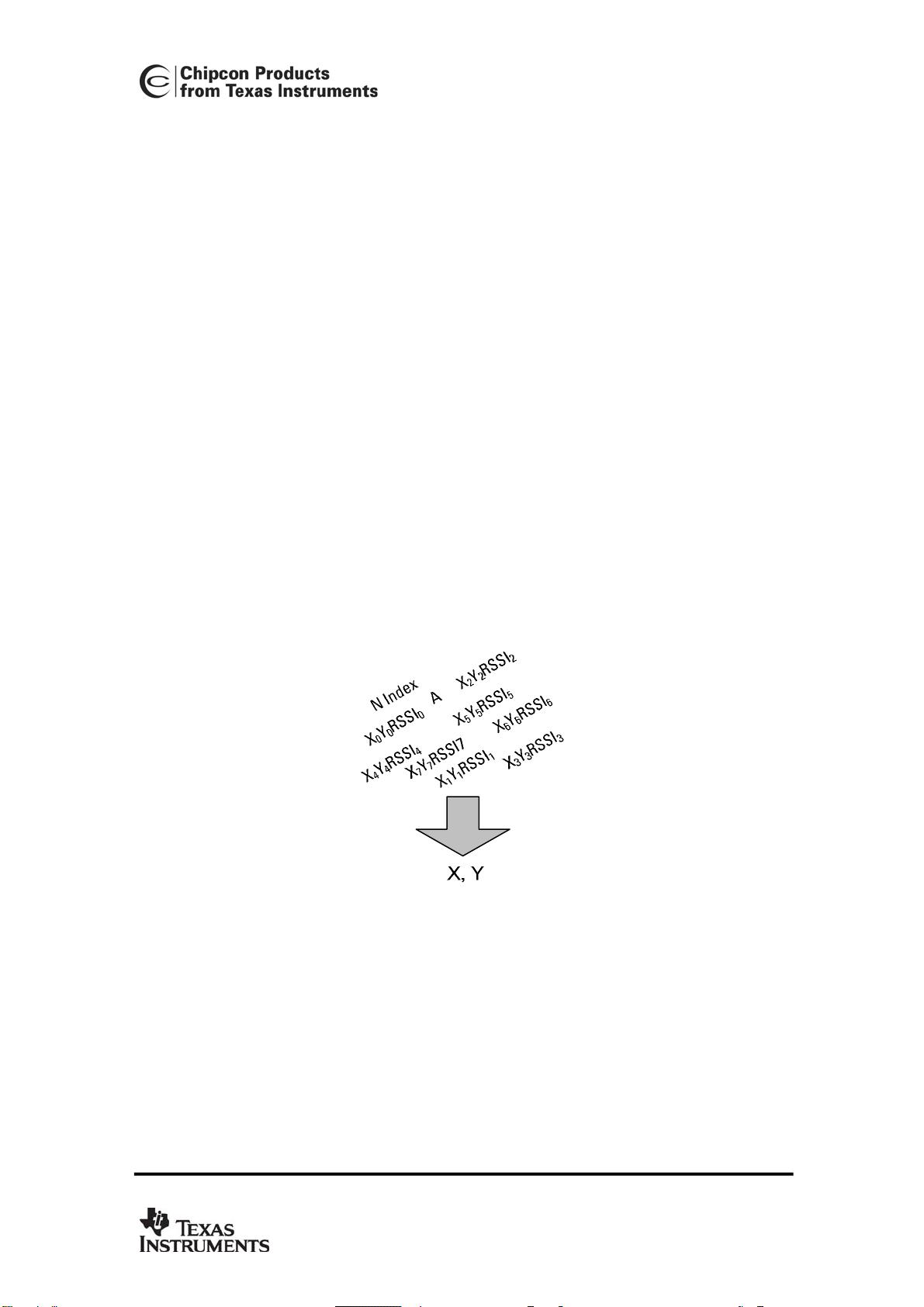
3.2 The location hardware
The location engine utilizes an extremely simple interface seen from the software layer; write
parameters in, wait for the calculation to performed, and read out the calculated position out.
This chapter will discuss the different parameters and how the shall be interpreted.
Figure 2: Location Engine, input and output
Application Note AN042 (Rev. 1.0)
SWRA095
Page 4 of 20
剩余18页未读,继续阅读
2009-04-17 上传
2022-09-21 上传
2023-05-16 上传
2023-05-16 上传
2023-11-04 上传
2023-04-02 上传
2023-08-09 上传
2023-05-13 上传
2023-06-09 上传

olisten
- 粉丝: 6
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
