使用粒子群算法与遗传算法优化PID控制器参数
版权申诉
"这篇文档是关于使用MATLAB实现基于粒子群算法(Particle Swarm Optimization, PSO)的PID控制器参数优化设计。文档详细介绍了算法原理,并通过一个案例展示了如何利用MATLAB进行仿真,优化PID控制器的Kp、Ki、Kd参数,以提升系统性能。此外,还提及了遗传算法(Genetic Algorithm, GA)作为另一种可能的优化工具。"
在PID控制器的设计中,参数Kp(比例增益),Ki(积分增益)和Kd(微分增益)的选择至关重要,它们直接影响到系统的稳定性和响应速度。传统的手动调整方法效率低下且难以达到最优。粒子群算法是一种借鉴鸟类群飞行为的全局优化算法,因其简单高效而被广泛应用在多种优化问题中,包括PID控制器的参数优化。
在案例中,被控对象为一个不稳定系统,通过MATLAB构建了PID控制器的系统结构。粒子群算法用于搜索Kp、Ki、Kd的最佳组合,以最小化性能指标ITAE(时间加权平均绝对误差)。在优化过程中,每个粒子代表一组可能的参数,通过迭代更新,粒子群逐渐接近全局最优解。图14-4和图14-5分别展示了参数变化曲线和性能指标变化曲线,最终确定的最优参数为Kp=33.6469,Ki=0.1662,Kd=38.8063,对应的ITAE值为1.0580。这些参数使得单位阶跃响应曲线如图14-6所示,达到了理想的响应效果。
除了粒子群算法,遗传算法也被用于PID控制器的参数优化。遗传算法模拟生物进化过程,通过选择、交叉和变异操作来逐步改进解决方案。尽管本文档没有详细介绍遗传算法的实现细节,但提到了其进化过程曲线和最优参数对应的单位阶跃响应曲线,分别如图14-7和图14-8所示。
在MATLAB中实现这些算法,需要设置如惯性因子w、加速常数c1和c2,以及粒子群的规模、最大迭代次数等参数。程序通过初始化粒子位置和速度,计算适应度值,并进行多次迭代来优化参数。代码段中`clear`和`clc`用于清理工作空间和清除命令窗口,`ObjFun=@PSO_PID`定义了待优化的目标函数,即PID控制器的性能评估函数。
这篇文档详细阐述了如何利用MATLAB结合粒子群算法优化PID控制器,提供了实际案例和仿真结果,为读者提供了一种有效优化控制系统的途径。同时,也提及了遗传算法作为备选方案,表明了在工程实践中可以根据具体需求选择合适的优化工具。
基于粒子群算法的 PID 控制器优化设计
1、案例背景
PID 控制器的性能取决于 Kp、Ki、Kd 这 3 个参数是否合理,因此,优化 PID 控制器参数具
有重要意义。目前,PID 控制器参数主要是人工调整,这种方法不仅费时,而且不能保证获
得最佳的性能。PSO 已经广泛应用于函数优化、神经网络训练、模式分类、模糊系统控制
以及其它应用领域,本案例将使用 PSO 进行 PID 控制器参数的优化设计。
3、案例实例及结果:
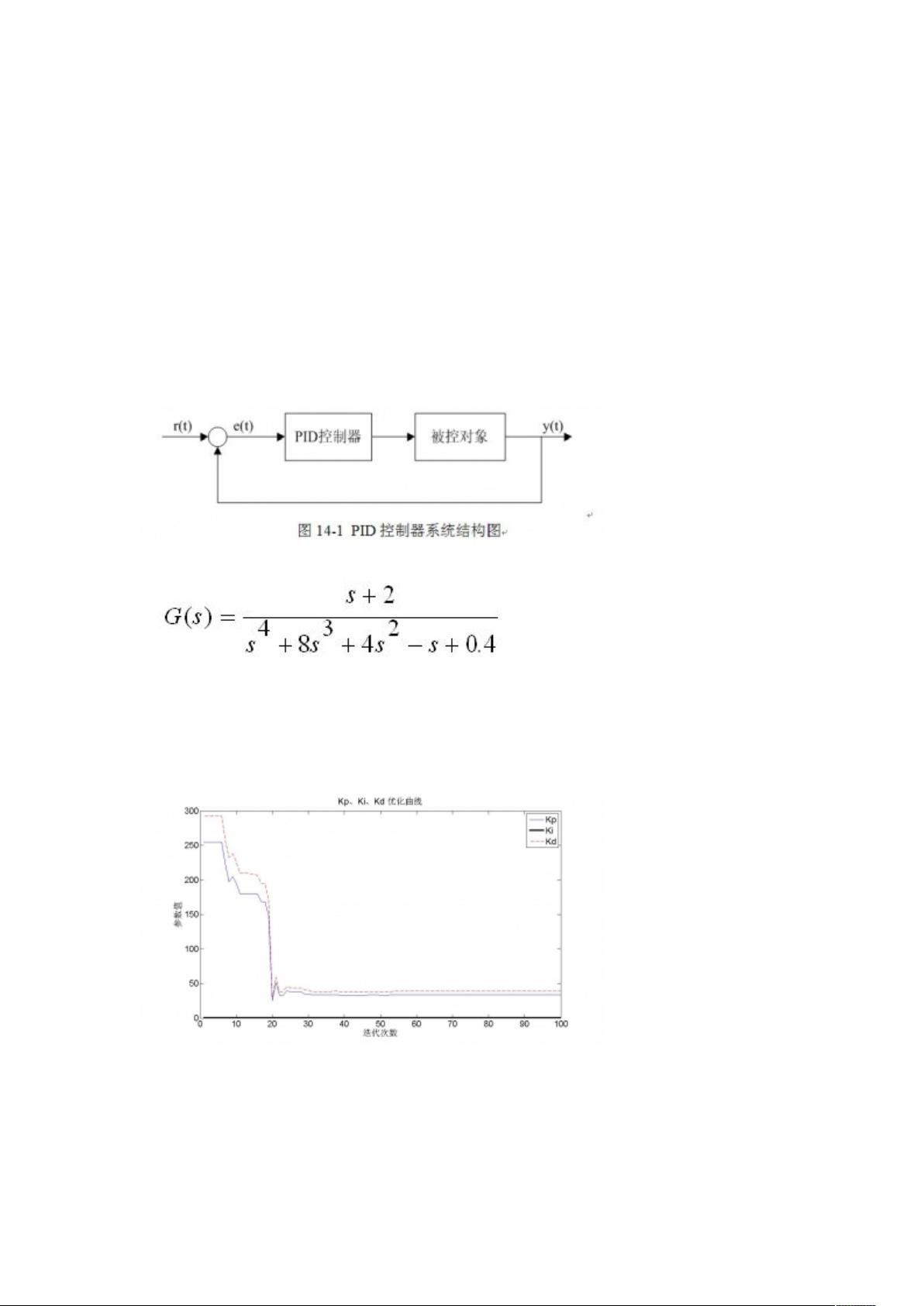
PID 控制器的系统结构图如图 14-1 所示。
选取的被控对象为以下不稳定系统:
运行代码,得到优化过程如图 14-4 和图 14-5 所示,前者为 PID 控制器 3 个参数 Kp、Ki、Kd
的变化曲线,后者为性能指标 ITAE 的变化曲线。得到的最优控制器参数及性能指标为
Kp= 33.6469,Ki= 0.1662,Kd= 38.8063,
ITAE= 1.0580,
将以上参数代回如图 14-2 所示的模型,得到的单位阶跃响应曲线如图 14-6 所示。
下载后可阅读完整内容,剩余4页未读,立即下载
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传
2023-06-09 上传


阿里matlab建模师
- 粉丝: 4385
- 资源: 2852
 我的内容管理
展开
我的内容管理
展开







