VS2010 C++ PID控制详解:结构仿真与参数声明
本篇文章详细介绍了如何在Visual Studio 2010环境下使用C++面向对象的方式实现PID(比例-积分-微分)控制算法。PID控制是一种常见的工业自动化控制策略,适用于各种需要精确控制的系统,如温度、压力等过程控制。文章首先从控制系统的结构仿真开始,通过一个简单的单输入单输出系统模型,设定参数如增益K、积分时间T1、微分时间T2以及延时参数τ。目标是确保系统的性能指标,如超调小于10%和调节时间Ts不超过10秒,并通过阶跃响应曲线来验证控制器的效果。
PID控制器的核心参数包括比例系数kp、积分系数ki和微分系数kd,以及采样时间T。为了处理连续信号到离散信号的转换,作者利用Z变换离散化系统模型,引入了den和num系数,它们分别代表Z变换的分母和分子。文章提到,den和num的具体计算方法可以在另一篇名为"理论分析|C++/VC/MFC/PID算法"的文章中找到,这可能是参考资料或链接。
在代码实现中,作者使用了一个名为"tagPid"的结构体来组织和管理所有的控制参数,如系统延时τ、采样时间ts、系统变量rin、yout、u,以及PID控制器的内部状态变量如误差(error)、积分误差(ierror)等。结构体还包括Z变换系数数组den_1, den_2, den_3和num_1, num_2, num_3,以及存储历史输出值的数组yout_和控制器输出值的历史记录u_。
文章的重点在于逐步解释如何通过C++编程语言实现PID控制算法的各个步骤,包括初始化参数、计算误差、更新积分项、微分项,以及最终根据PID法则计算出控制器输出u。增量PID算法的引入则增加了算法的精度,通过引入error_2来处理误差的递推计算。整个过程中,作者强调了注释的重要性,确保了代码的可读性和理解性。
总结来说,这篇教程是针对有经验的C++开发者,旨在帮助他们理解和应用PID控制算法于实际的VS2010项目中,提供了关键的理论背景、参数设置和编程实现步骤。对于希望在控制系统设计中使用PID控制的程序员来说,这是一份非常有价值的资源。
实现 控制算法 算法
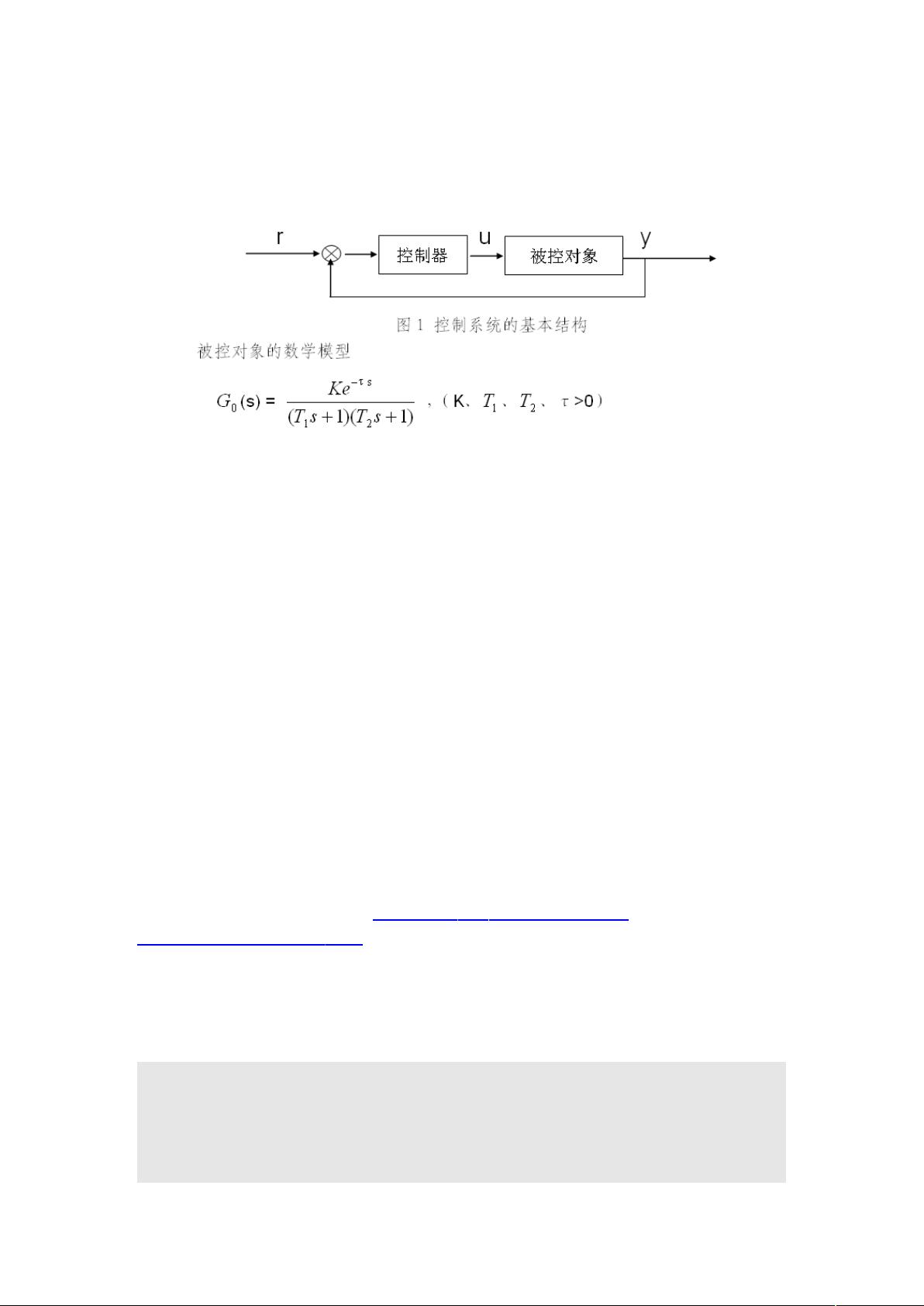
第一步:控制系统的结构仿真
我们要用 实现对这个单输入单输出系统的 控制算法,就需要先进
行结构仿真,系统结构和对象的数学模型如上图所示,我们取定参数:
、、,( 代表上面那个延时参数)。
系统性能指标要求:超调,调节时间 秒,绘制出系统的
单位阶跃响应。
控制器采用 控制器,控制器参数包括:、 、!、(采样时
间)。
对被控对象采用 " 变换进行离散化,离散化后的离散化对象为:
#$%&!'(%&#$%&!'(%)&#$%&($*%&$%
&($*%)&$%&++++++++++
#$%&!'(%&#$%&!'(%)&#$%&($*%&$%(&
($*%)&$%(&++++++++++(,(- 为整数
!'(、($* 参数的获取参看“ 实现
控制算法 理论分
析
算法 ”
、参数声明
在算法中要用到很多参数,为了方便我们定义一个结构体。
#'!'./$01 !
2
++++!$34'5++++系统纯延时参数,一般为采样时间的整数倍
++++!$34'5++++采样时间
++++ ((5++++(
下载后可阅读完整内容,剩余4页未读,立即下载
2012-07-04 上传
2023-05-11 上传
2023-09-13 上传
2023-09-28 上传
2023-04-20 上传
2024-11-17 上传
2023-02-17 上传









