Fanuc机器人控制器与编程操作指南
183 浏览量
更新于2024-06-24
收藏 2.03MB PPT 举报
"Fanuc机器人控制器及编程PPT课件详细介绍了Fanuc机器人操作与编程的各个方面,包括控制器、示教器、机器人坐标系以及各种功能键的使用方法。"
Fanuc机器人控制器是工业自动化领域中广泛应用的一种高精度、高性能的设备,主要负责控制机器人的动作和执行程序。在R-J3iB示教器中,用户可以通过直观的界面进行机器人的编程和调试。
复位键(RESET键)是消除报警信息的关键,当机器人出现故障或报警时,按下此键可以清除提示信息,帮助恢复到正常工作状态。而SHIFT键则作为一个辅助键,与其他键配合使用,执行特殊功能,比如在编程时进行特定的操作。
Jog键允许用户手动控制机器人的关节运动,包括J1至J6关节,以微调机器人的位置。COORD键用于切换不同的坐标系,如关节坐标系、直角坐标系(World)、工具坐标系(Tool),以及可能存在的其他自定义坐标系,这些坐标系的切换对精确控制机器人至关重要。
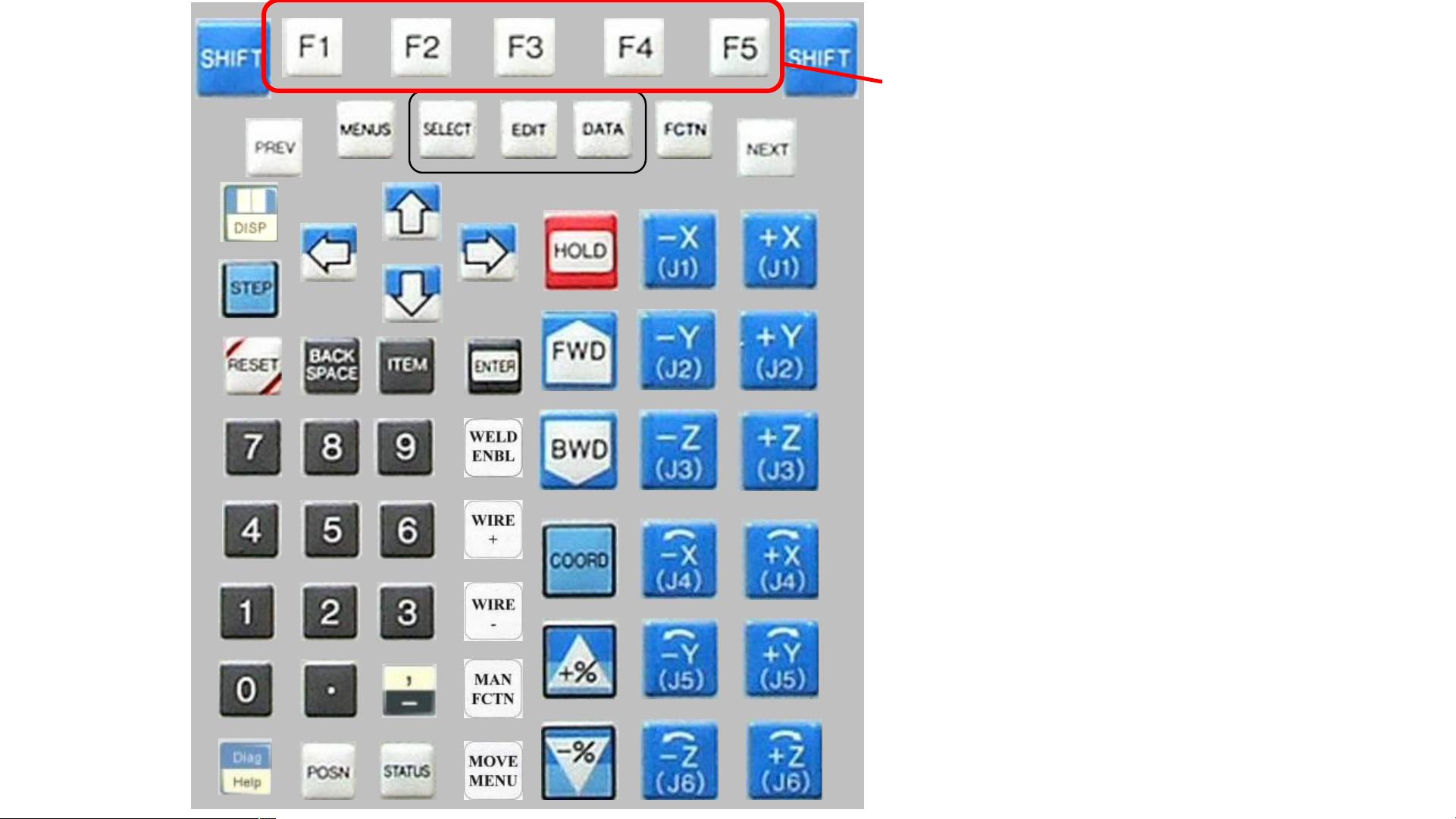
速度键用来调整机器人的运动速度,确保在不同任务中能够安全、高效地执行。程序键,如SELECT、EDIT和DATA键,分别用于查看程序列表、编辑当前程序和访问数据,如焊接参数和设置。
功能键F1至F5以及与其关联的NEXT键,提供了丰富的操作选项,可以执行特定的任务或功能。光标键用于在屏幕上移动光标,数字键则用于输入数值,包括负数、小数和分隔符。确认键用于确认输入或选择,而STEP键在T1或T2模式下切换单步执行和连续运行。
FWD和BWD键在编程调试时特别有用,FWD键执行下一步程序,BWD键则回溯到前一步,便于检查和修正程序。WELDENBL键则控制焊接过程的启停,对于涉及焊接的应用,这个功能键非常关键。
这份PPT课件详细讲解了Fanuc机器人控制器的操作界面和编程流程,涵盖了从基本控制到高级功能的各个方面,是学习和掌握Fanuc机器人操作的宝贵资料。通过深入理解和实践,用户可以有效地控制和编程Fanuc机器人,提高生产效率和作业精度。

剩余48页未读,继续阅读
2022-06-30 上传
2023-07-14 上传
2023-05-18 上传
2023-05-18 上传
2023-06-27 上传
2023-08-01 上传
2023-05-19 上传

智慧安全方案
- 粉丝: 3795
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
