五杆并联机器人轨迹插补算法及其应用
下载需积分: 50 | PDF格式 | 2.66MB |
更新于2024-08-11
| 102 浏览量 | 举报
本文主要探讨了两自由度的五杆并联机器人在运动轨迹插补方面的研究。五杆并联机器人因其良好的刚度和高精度,被广泛应用于工业领域,尽管国内外学者对此有所研究,但大多停留在理论层面。本文的核心贡献在于提出了一种创新的运动轨迹插补方法——小直线增量步长算法。这种算法利用雅各比矩阵,能够根据预设的误差要求精确计算和跟踪机器人的运动轨迹。
该算法基于传统的定距插补,但通过优化步长策略,提高了插补的精度和效率。作者强调,五杆并联机器人特有的对称设计,使得L1和L3杆的长度相等,L2和L4杆长度也相同,且各杆件之间角度固定,这在数学建模中起着关键作用。两个步进电机分别控制L1和L2的转动,反映了机器人的基本工作原理。
为了验证这一算法的有效性,研究者首先进行了仿真实验,然后在Mach3系统上构建了实际样机进行试验。Mach3系统是一个常见的通用数控系统,它的应用确保了算法在实际工业环境中的可行性。实验结果显示,提出的插补算法能够达到预期的轨迹控制效果,证明了其在五杆并联机器人轨迹控制中的可靠性和实用性。
此外,文章还包含了五杆并联机器人的结构模型示意图,以及其数学模型的详细描述,包括杆件间的连接点和角度关系。这些内容对于理解机器人的工作原理和运动特性至关重要。
这篇论文不仅深入探讨了五杆并联机器人运动轨迹插补的问题,还提供了一种实用的解决方案,并通过实验验证了其有效性,对于推动五杆并联机器人在工业自动化领域的应用具有重要意义。
第23卷 第 4 期
2 0 1 0 年 12 月
青 岛 大 学 学 报 (自 然 科 学 版 )
JOURNAL OF QINGDAO UNIVERSITY (Natural Science Edition)
Vol .23 No .4
Dec .2 0 1 0
文章编号 :1006 1037(2010)04 0065 05
doi :10 .3969/
j
.issn .1006 1037 .2010 .04 .015
五 杆 并 联 机 器 人 运 动 轨 迹 插 补 计 算
倡
孙 涛
1
,方 漪
2
(1 .青岛大学信息工程学院 ,山东 青岛 266071 ;2 .青岛大学软件技术学院 ,山东 青岛 266061)
摘要 :研究了两自由度的五杆并联机器人运动轨迹的插补问题 ,提出了一种小直线增量
步长算法 ,利用雅各比矩阵按照给定误差要求实现运动轨迹的插补算法 。 并且提出了一
种 ,利用通用数控系统实现五杆并联机器人运动的方法 。 插补算法在仿真实验的基础上 ,
在 Mach3 系统上实现了样机实验 ,取得了预期的结果 。
关键词 :并联机器人 ;插补算法 ;运动轨迹
中图分类号 :T P391 .8 ;TP391 .9 文献标志码 :A
1 问题
五杆并联机器人与一般的串联机器人相比 ,主要具有刚度好 、精度高的特点 ,这些特点使其能够在工业
方面得到广泛应用 。 国内外许多学者对五杆并联机器人进行了一些研究
[1‐2]
,但多停留在理论阶段 。 要把五
杆并联机器人应用于加工过程 ,必须首先解决轨迹控制问题 。 机器人的末端轨迹控制方法主要有两类 ,即定
时插补和定距插补 ,具体原理可见文献[3][4] 。 本文在定距插补算法的基础上 ,提出了一种小直线增量步长
算法 ,按照给定误差要求利用雅各比矩阵计算运动轨迹的插补 。 并且提出了一种利用通用数控系统实现五
杆并联机器人运动轨迹的控制方法 。 我们通过仿真实验对算法进行了验证 ,并制造了一个原型样机 ,控制系
统采用 Mach3 系统进行了样机试验 ,实验结果验证本文算法的可靠性 。
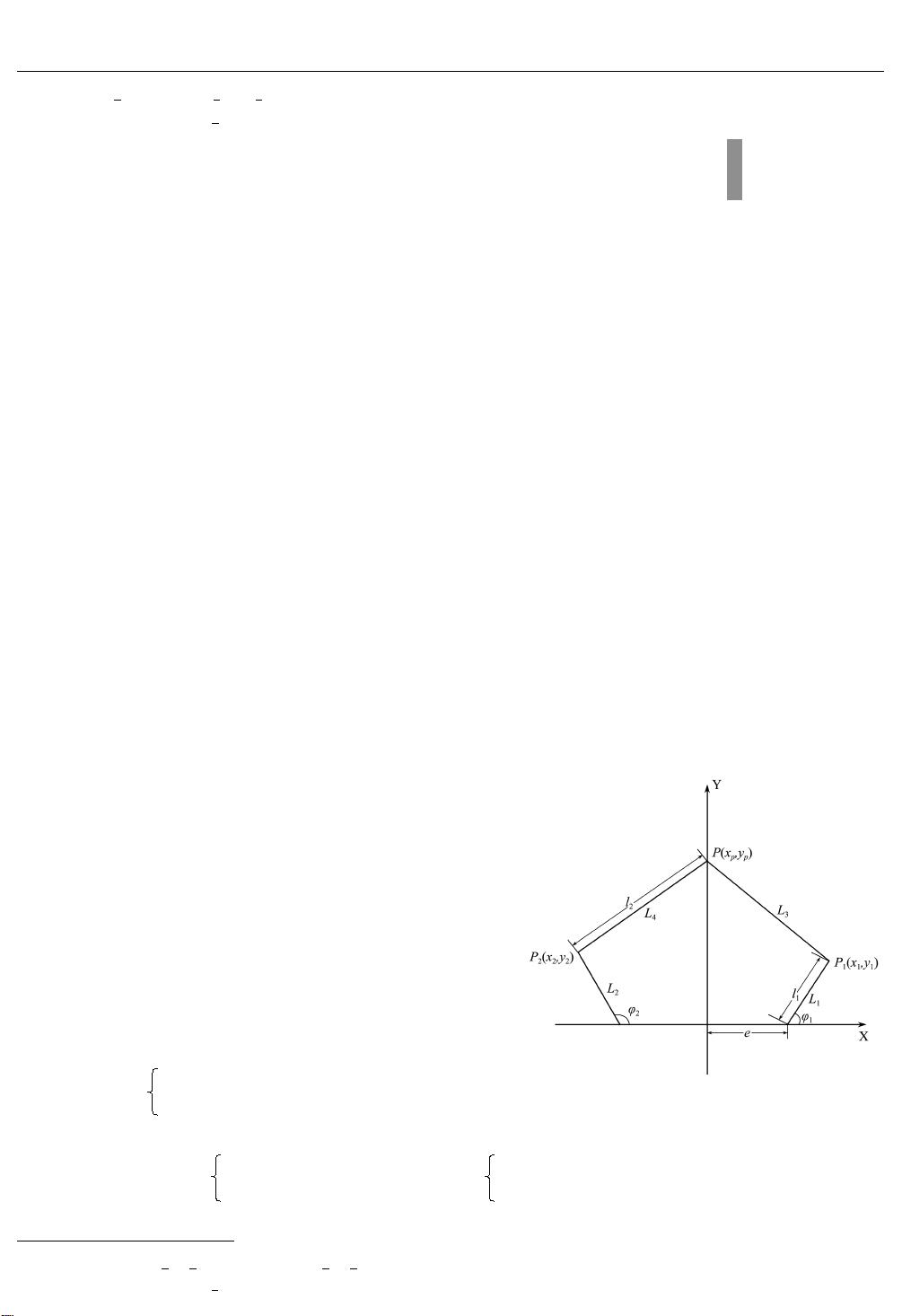
图 1 五杆并联机器人结构模型
2 五杆并联机器人的数学模型
如图 1 所示 ,X 轴为固定平台 ,L
1
,L
2
,L
3
,L
4
是五杆并联
机器人的四个活动杆件 ,此五杆并联机器人采用对称设计 ,下
边两杆的长度均为 l
1
,上边两杆长度均为 l
2
,L
1
杆与 L
3
杆间的
结点为 P
1
,L
2
与 L
4
之间的结点为 P
2
,L
1
,L
2
与 X 轴的的夹角
分别为
φ
1
,
φ
2
,两个步进电机分别控制 L
1
与 L
2
杆的转动 ,即
φ
1
,
φ
2
的转动 ,两个步进电机到原点的距离为 e ,P 点为运动的
末节点 。
根据约束条件 :
(x
p
- x
1
)
2
+ (
y
p
-
y
1
)
2
= l
2
2
(x
p
- x
2
)
2
+ (
y
p
-
y
2
)
2
= l
2
2
(1)
其中
x
1
= l
1
cos
φ
1
+ e
y
1
= l
1
sin
φ
1
(2)
x
2
= l
2
cos
φ
2
- e
y
2
= l
2
sin
φ
2
(3)
倡
收稿日期 :2010 06 20 ;修回日期 :2010 09 28
作者简介 :孙 涛 (1985 ) ,男 ,硕士生 。 研究方向 :图像处理与计算机视觉 。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐





weixin_38623366
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
