非线性最小二乘法在多传感器标定中的应用
201 浏览量
更新于2024-08-31
1
收藏 313KB PDF 举报
"该文探讨了基于多传感器系统的统计建模与标定方法,重点关注在融合惯性、视觉、磁场信息以及嵌入式技术的定位系统中如何提高传感器的精度。文章提出了一种非线性最小二乘法为基础的低成本高精度标定方案,通过对加速度计模型的分析,利用重力加速度进行标定。仿真实验表明,这种方法能够有效降低误差,提升系统传感器的精度。"
在现代多传感器定位系统中,精确的标定模型对于确保传感器的测量精度至关重要。本文针对这一需求,提出了一种创新的标定策略,特别关注于在嵌入式技术环境下的应用。嵌入式技术使得传感器可以集成到各种设备中,实现更高效的数据融合和处理。
首先,文章深入探讨了系统参数的分析,以加速度计为案例建立模型。加速度计作为常见的传感器类型,广泛应用于运动检测、导航等领域。其模型建立过程涉及到对传感器响应特性的理解,包括非线性行为和潜在的不准确性。文章提出利用地球的重力加速度作为参考,校准传感器的确定性项,以消除或减少由于制造和装配误差导致的不确定性。
非线性最小二乘法是一种优化技术,用于拟合复杂数据集并找到最佳参数估计。在此文中,这种方法被用来最小化标定过程中产生的误差,从而提高传感器的整体性能。通过仿真实验,验证了该方法的有效性和实用性,表明它能够显著降低测量误差,提升系统中传感器的精度。
标定是传感器生命周期中的关键步骤,它可以确保传感器的量值准确传递,并为设计优化提供有价值的信息。针对现有的标定方法存在的不足,本文提出的低成本方案在数据处理方面有所改进,旨在通过适当的处理方式进一步提升精度,尤其适用于那些精度要求较高的应用场景。
传感器模型的建立是理论分析的基础。文章展示了多传感器定位系统的一般框架,强调了传感器模型的相似性,特别是三轴加速度计、陀螺仪和磁场传感器的非正交性和非线性响应。通过建立这些模型,可以更好地理解和校正传感器的误差源,如敏感轴的非正交性以及电气噪声的影响。
本文提供的标定方法不仅考虑了传感器的物理特性,还充分利用了嵌入式系统的计算能力,为多传感器系统的精度提升提供了新的途径。这种方法的应用将有助于提高各种应用领域,如自动驾驶、无人机导航和室内定位等的性能和可靠性。
基于多传感器系统的统计建模与标定方法基于多传感器系统的统计建模与标定方法
在融合惯性、视觉、磁场信息以及嵌入式技术的多传感器定位系统中,标定模型的准确性会影响传感器测量精
度。以非线性最小二乘法为基础,提出了一种低成本高精度的标定方法。首先,分析系统各项参数,以加速度
计为例建立模型,并利用重力加速度作中间量对传感器确定性项进行标定。通过仿真实验分析,结果表明提出
的方法实用可行,能降低误差,提高系统传感器精度。
0 引言引言
近年来,随着微机电(MEMS)技术的快速发展,传感器的应用越来越广泛,传感器
[1]
。标定是设计、制造和使用传感器的
一个重要环节,任何传感器在制造、装配完毕后都必须进行标定,以保证量值的准确传递,并将标定数据作为改进传感器设计
的重要依据
[2]
。
对于
[3]
。文献[4-5]提出一种MEMS惯性传感器标定方法,成本与精度优于传统方法,但在标定数据处理方法上仍存在不足,
不同的数据处理方法有不同的精度,对于一个精度不够高的传感器,若标定数据处理方法得当,会在实测中产生较小的误差,
提高传感器精度。
本文提出一种低成本的标定方法,在最小二乘估计的基础上建立了传感器的输入—输出特性及其误差关系。利用
[6-7]
。此方
法为分析
1 传感器模型传感器模型
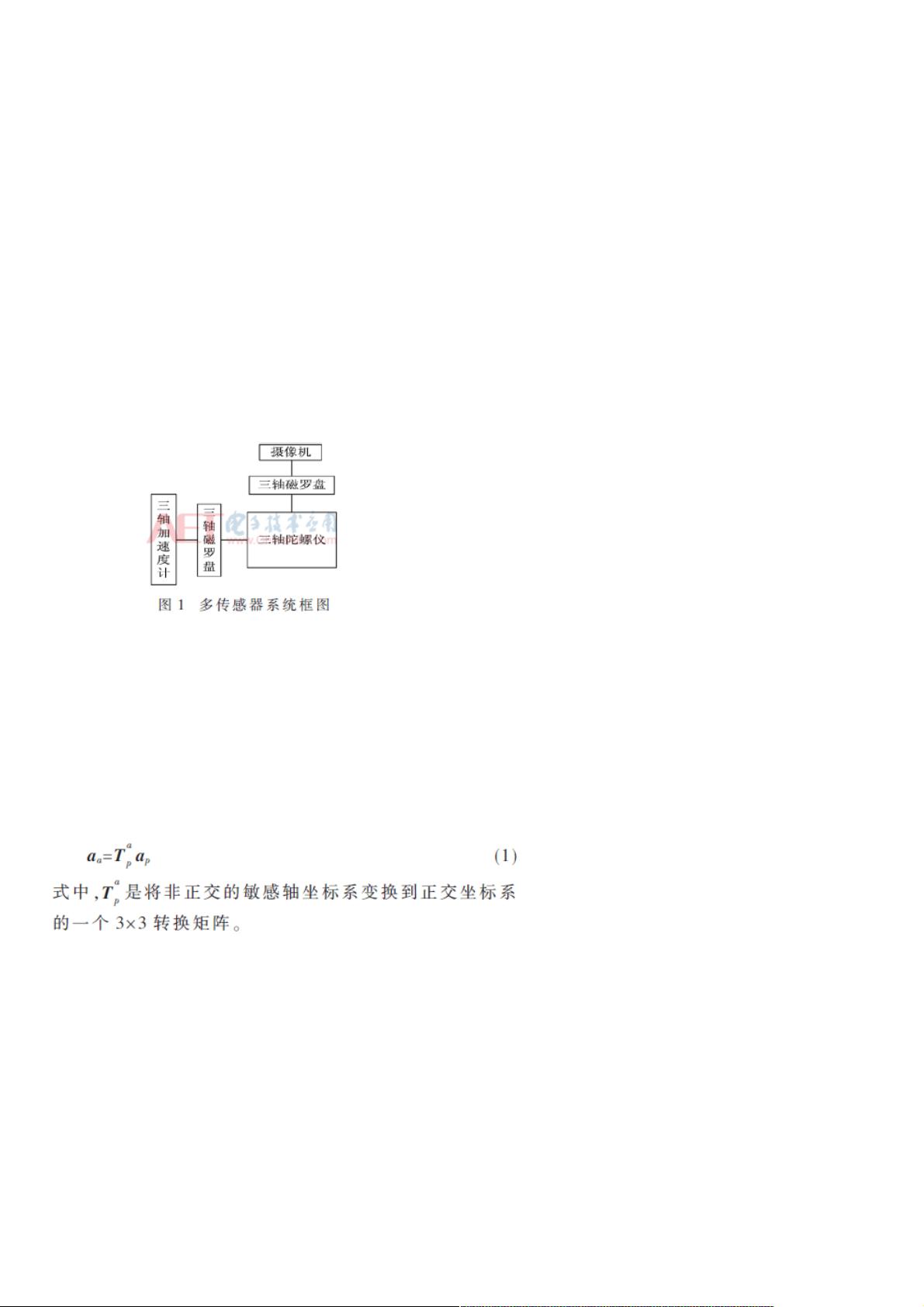
本文提出的多传感器定位系统框图如图1所示。由于三轴加速度计传感器、陀螺仪与磁场传感器都将物理量分解到传感器的
三个敏感轴上并转化为相应的电信号
[9]
,因此传感器模型的形式相同。本文主要以加速度计的模型为例加以说明。
系统中除上述转换误差以外,加速度计、陀螺仪等还存在电噪声的干扰,如图2所示。由于加速度计传感器装配误差的存
在,使其三个敏感轴非严格正交。基于上述分析与假设,本文建立了一个多传感器标准平台,具备非正交性敏感轴以及非线性
响应的特点,如图3所示。O-x
a
y
a
z
a
是空间中的一个正交坐标系,即加速度计坐标系;O-x
p
y
p
z
p
为传感坐标系,即由加速度计
的敏感轴组成的非正交坐标系。标量α
ij
为O-x
a
y
a
z
a
和O-x
p
y
p
z
p
之间的夹角,表示图中平台系统的第j个轴所对应的加速度计第i
个敏感轴的相对方位角。a
p
表示加速度计传感器将物理量分解到三个敏感轴上后实际承受的加速度大小,即为3×1的列向量。
a
a
表示加速度计的原始输出电压向量值,也为3×1的列向量。由系统输入输出间关系可得,以上两个加速度矢量之间的关系转
换式如下所示:
下载后可阅读完整内容,剩余4页未读,立即下载
2022-12-26 上传
2021-10-08 上传
2021-08-15 上传
2024-01-08 上传
2010-02-22 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38664612
- 粉丝: 6
- 资源: 888
 我的内容管理
展开
我的内容管理
展开







