Foxboro I/A DCS系统详解:炼油行业的中枢神经
88 浏览量
更新于2024-07-14
收藏 2.91MB PDF 举报
"该文档是北京康森过程控制技术有限公司提供的关于FOXBORO DCS系统的详细介绍,特别是其I/A系列产品的技术资料。文档涵盖了炼油行业的简要介绍、DCS系统在实际现场的应用、I/A系统的主要设备、系统构建过程、操作台图片、系统操作管理界面、常用第三方产品以及FCP270控制器的深入解析和典型回路的初步理解。"
正文:
FOXBORO DCS(分布式控制系统)系统是工业自动化领域的先进解决方案,尤其在炼油和其他重工业中有着广泛的应用。其中,FOXBORO I/A系列是该公司的旗舰产品,以其高度可靠性和灵活性著称。这份文档旨在提供对FOXBORO I/A系统的全面理解。
首先,文档从炼油行业的全景图和工艺装置入手,展示了DCS系统在复杂工业环境中的应用。DCS系统通常用于中央控制室,通过集中监控和操作来实现工厂的高效运行和安全控制。
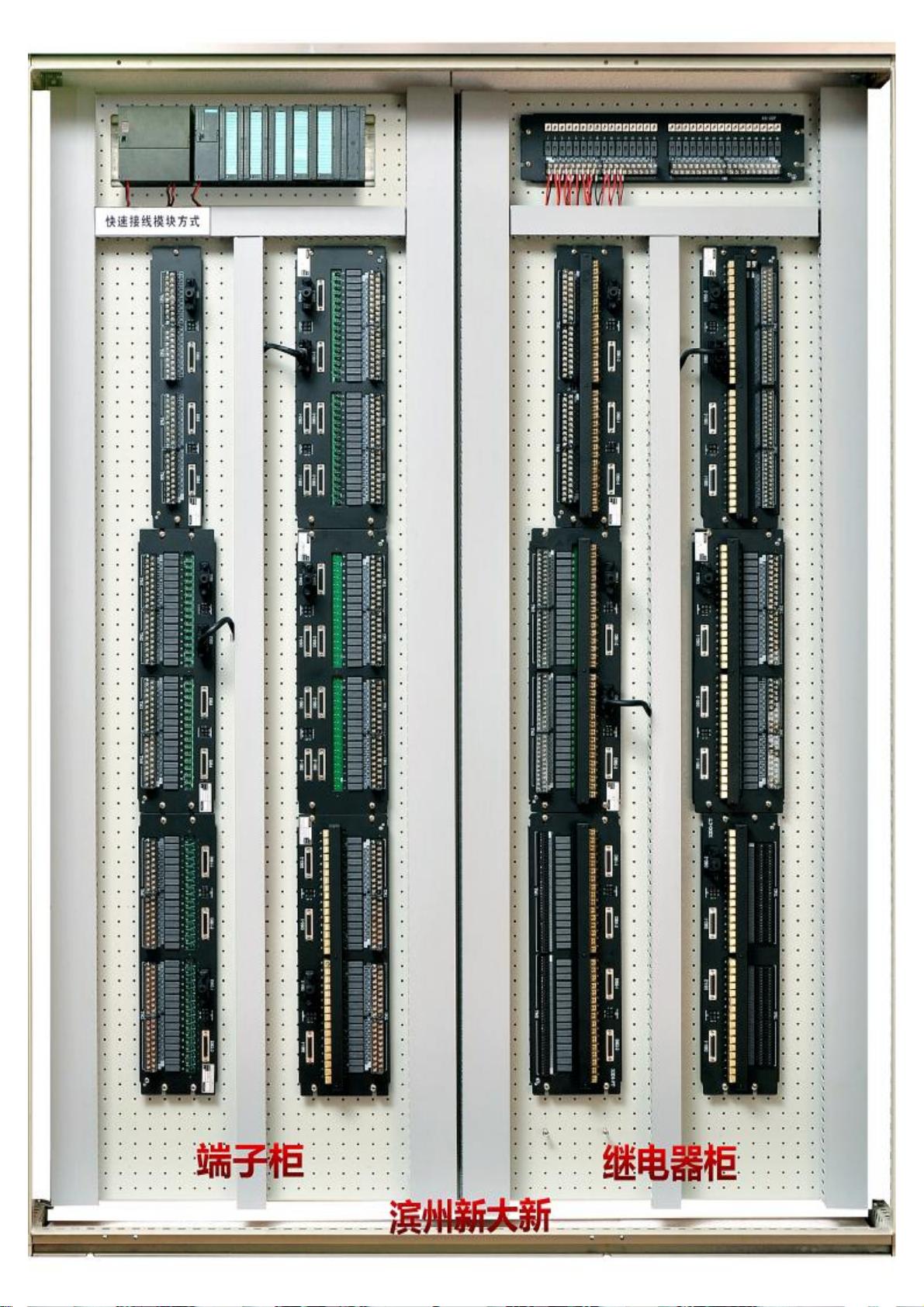
接着,文档展示了DCS系统在实际工作现场的角色,包括中控室和机柜。中控室是DCS系统的心脏,操作员在这里对整个生产过程进行监视和控制;而机柜则包含了系统的硬件设备,如I/O卡件,它们负责接收和处理来自现场的信号。
在I/A'S主要设备部分,文档提到了工作站、交换机和FCP270控制器及其扩展卡。工作站是操作员与系统交互的平台,交换机则确保了数据在网络中的顺畅传输。FCP270是FOXBORO的一款关键控制器,它支持多种通讯协议和扩展功能,能够满足不同应用需求。
此外,文档还列出了常用的I/O卡件,如MODBUS通讯卡和Profibus-DP通讯卡,这些卡件使得系统能与各种设备进行通信,增强了系统的兼容性。例如,FBM224适用于MODBUS通讯,而FBM223则服务于Profibus-DP通讯,两者都提供多通道输入/输出功能,能够处理大量的现场数据。
系统构建部分虽然没有详细展开,但可以理解为包括了网络架构设计、硬件安装、软件配置和系统调试等步骤,确保系统能够按照用户需求定制并稳定运行。
系统操作管理界面和常用第三方产品部分,可能涉及到用户友好的图形化操作界面以及与第三方设备的集成,这为操作人员提供了直观的工作环境,并能与现有的工业生态系统无缝对接。
最后,对典型回路的初步了解部分,可能是对过程控制中常见控制回路的讲解,如PID控制,帮助用户理解如何通过DCS系统实现对生产过程的精确控制。
这份文档为读者提供了深入理解FOXBORO DCS系统,特别是I/A系列的宝贵资料,不仅涵盖了硬件设备,也涉及了系统集成、操作管理和控制策略等方面,对于从事或学习工业自动化的人来说极具价值。
剩余28页未读,继续阅读
2023-05-28 上传
2023-05-24 上传
2024-09-06 上传
2024-09-06 上传
2024-09-06 上传
2024-09-06 上传
2024-09-06 上传
2024-09-06 上传
2024-09-06 上传

weixin_38547409
- 粉丝: 5
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
